Automotive Elevation Mapping with Interferometric Synthetic Aperture Radar
作者: Leyla A. Kabuli, Griffin Foster
分类: eess.SP, cs.CV, eess.IV
发布日期: 2025-01-14
备注: 9 pages, 6 figures
💡 一句话要点
利用干涉合成孔径雷达实现车辆高程精确测绘,适用于城市和农业环境
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 干涉合成孔径雷达 车载雷达 三维重建 自主驾驶 环境感知
📋 核心要点
- 传统车载雷达受限于分辨率和灵敏度,难以精确获取环境的三维信息,尤其是在复杂环境中。
- 论文提出利用干涉合成孔径雷达(InSAR)技术,从相位变化中提取高程信息,提升雷达的三维感知能力。
- 实验表明,该方法能够利用低分辨率雷达在城市和农业环境中生成精确的三维点云地图,支持自主驾驶决策。
📝 摘要(中文)
雷达是一种低成本且普遍存在的车载传感器,但在进行波达方向分析时受到阵列分辨率和灵敏度的限制。合成孔径雷达(SAR)是一类提高雷达方位角分辨率和灵敏度的技术。干涉合成孔径雷达(InSAR)可用于从SAR图像中相位测量的变化中提取高程信息。我们利用InSAR表明,安装在车辆上的典型低分辨率雷达阵列可用于在城市和农业环境中准确定位3D空间中的检测结果。通过将InSAR与针对汽车驾驶量身定制的信号处理方案相结合,我们在每个环境中生成点云。这种低计算量的方法使雷达能够用作主要传感器,以绘制复杂驾驶环境中的精细细节,并用于做出自主感知决策。
🔬 方法详解
问题定义:现有车载雷达在复杂驾驶环境中,由于分辨率和灵敏度的限制,难以准确获取周围环境的三维信息,这对于自主驾驶的感知至关重要。传统方法难以在低成本、低功耗的条件下实现高精度的三维环境感知。
核心思路:论文的核心思路是利用干涉合成孔径雷达(InSAR)技术,通过分析雷达信号的相位差异来提取目标的高度信息。InSAR能够有效提高雷达的分辨率和灵敏度,从而实现对环境的三维重建。这种方法利用了雷达信号的相位信息,无需额外的硬件成本。
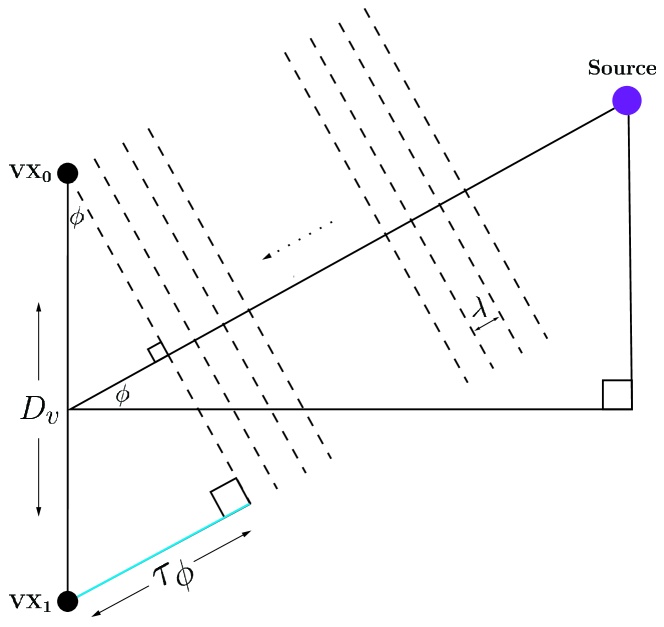
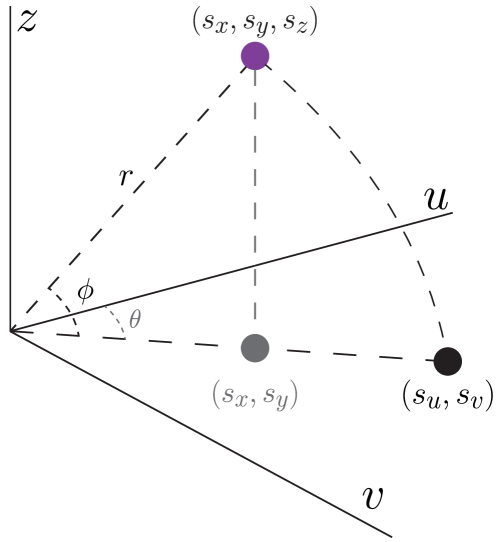
技术框架:该方法主要包含以下几个阶段:1) 雷达数据采集:利用车载雷达阵列采集周围环境的雷达信号。2) SAR图像生成:利用合成孔径雷达技术,将多次雷达扫描的数据合成为高分辨率的SAR图像。3) 干涉处理:对SAR图像进行干涉处理,提取相位信息。4) 高程提取:根据相位信息计算目标的高度,生成三维点云地图。5) 信号处理优化:针对汽车驾驶场景,设计特定的信号处理方案,提高算法的鲁棒性和效率。
关键创新:该论文的关键创新在于将InSAR技术应用于车载雷达,并针对汽车驾驶场景进行了优化。与传统的雷达三维感知方法相比,该方法能够在低成本、低功耗的条件下实现高精度的三维环境感知。此外,论文还提出了一种针对汽车驾驶的信号处理方案,提高了算法在复杂环境下的性能。
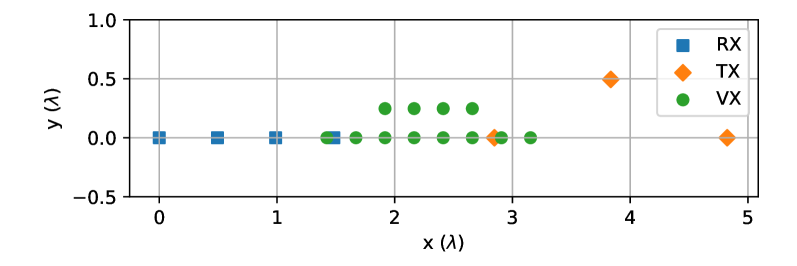
关键设计:论文的关键设计包括:1) 雷达阵列的配置:选择合适的雷达阵列配置,以获得最佳的干涉效果。2) SAR图像的生成算法:采用高效的SAR图像生成算法,以降低计算复杂度。3) 相位解缠算法:选择合适的相位解缠算法,以准确提取相位信息。4) 信号处理方案:针对汽车驾驶场景,设计特定的信号处理方案,例如,采用卡尔曼滤波等方法对点云进行平滑处理。
🖼️ 关键图片
📊 实验亮点
论文展示了在城市和农业环境中利用InSAR技术生成的三维点云地图,证明了该方法能够利用低分辨率雷达实现高精度的三维环境感知。虽然论文中没有给出明确的量化指标,但通过可视化结果可以看出,该方法能够有效地提取环境中的细节信息,例如建筑物、树木等,为自主驾驶提供可靠的环境信息。
🎯 应用场景
该研究成果可广泛应用于自主驾驶领域,为车辆提供精确的三维环境感知能力,提高车辆在复杂环境下的安全性和可靠性。此外,该技术还可应用于高精度地图绘制、智能交通管理等领域,具有重要的实际应用价值和广阔的发展前景。
📄 摘要(原文)
Radar is a low-cost and ubiquitous automotive sensor, but is limited by array resolution and sensitivity when performing direction of arrival analysis. Synthetic Aperture Radar (SAR) is a class of techniques to improve azimuth resolution and sensitivity for radar. Interferometric SAR (InSAR) can be used to extract elevation from the variations in phase measurements in SAR images. Utilizing InSAR we show that a typical, low-resolution radar array mounted on a vehicle can be used to accurately localize detections in 3D space for both urban and agricultural environments. We generate point clouds in each environment by combining InSAR with a signal processing scheme tailored to automotive driving. This low-compute approach allows radar to be used as a primary sensor to map fine details in complex driving environments, and be used to make autonomous perception decisions.