ActiveGAMER: Active GAussian Mapping through Efficient Rendering
作者: Liyan Chen, Huangying Zhan, Kevin Chen, Xiangyu Xu, Qingan Yan, Changjiang Cai, Yi Xu
分类: cs.CV, cs.RO
发布日期: 2025-01-12 (更新: 2025-09-04)
备注: Accepted to CVPR2025. Project page: https://oppo-us-research.github.io/ActiveGAMER-website/. Code: https://github.com/oppo-us-research/ActiveGAMER
💡 一句话要点
ActiveGAMER:通过高效渲染实现主动高斯映射,用于实时场景探索与重建。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 主动映射 3D高斯溅射 信息增益 场景重建 机器人导航
📋 核心要点
- 传统基于NeRF的主动映射方法计算量大,限制了探索效率和重建质量,难以在复杂环境中应用。
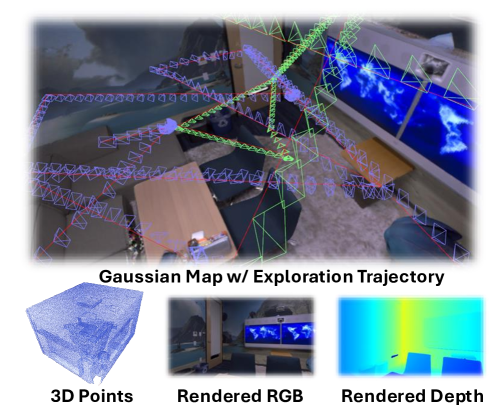
- ActiveGAMER利用3DGS的高效渲染能力,通过渲染信息增益动态规划最佳视点,提升几何和光度重建精度。
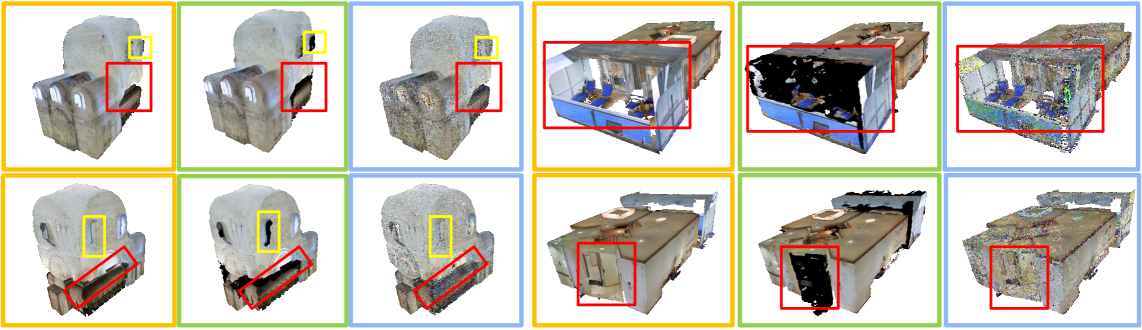
- 系统结合粗到精探索、后细化和关键帧选择策略,在Replica和MP3D数据集上超越现有方法。
📝 摘要(中文)
本文提出了一种名为ActiveGAMER的主动映射系统,该系统利用3D高斯溅射(3DGS)来实现高质量、实时的场景映射和探索。与传统的基于NeRF的方法相比,我们的方法计算量更小,从而提高了主动映射的性能。ActiveGAMER的核心是一个基于渲染的信息增益模块,该模块动态地识别最具信息量的视点,用于下一步最佳视点规划,从而提高了几何和光度重建的准确性。ActiveGAMER还集成了一个精心平衡的框架,结合了由粗到精的探索、后细化和全局-局部关键帧选择策略,以最大限度地提高重建的完整性和保真度。我们的系统能够自主探索和重建环境,并在几何和光度精度以及完整性方面均达到最先进水平,显著超越了现有方法。在Replica和MP3D等基准数据集上的大量评估突出了ActiveGAMER在主动映射任务中的有效性。
🔬 方法详解
问题定义:现有主动映射方法,特别是基于NeRF的方法,在计算资源上需求较高,导致探索速度慢,重建质量受限,难以应用于大规模或复杂的环境。这些方法通常需要大量的渲染和优化迭代,使得实时性和效率成为瓶颈。
核心思路:ActiveGAMER的核心在于利用3D高斯溅射(3DGS)的高效渲染能力,替代NeRF的体渲染。通过快速渲染不同视点下的场景,并计算信息增益,系统能够动态地选择最具信息量的下一个视点,从而实现高效的场景探索和重建。这种方法显著降低了计算负担,提高了探索效率。
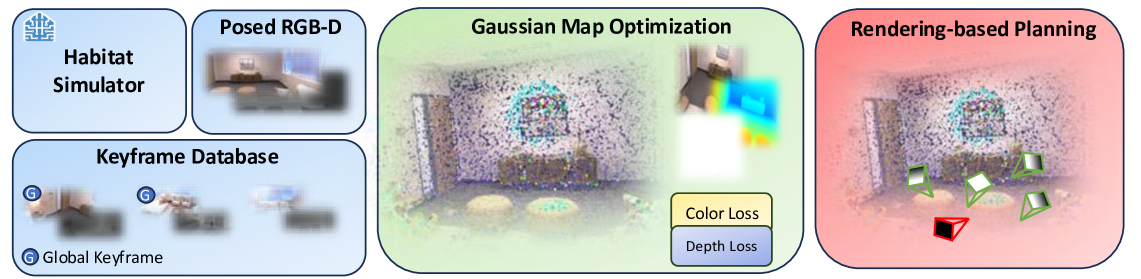
技术框架:ActiveGAMER系统主要包含以下几个模块:1) 基于3DGS的场景表示模块,用于存储和渲染场景;2) 基于渲染的信息增益模块,用于评估不同视点的信息量;3) 下一步最佳视点规划模块,用于选择最具信息量的视点;4) 粗到精的探索策略,先进行全局探索,再进行局部细化;5) 后细化模块,用于进一步优化重建结果;6) 全局-局部关键帧选择策略,用于选择合适的关键帧,减少冗余信息。
关键创新:ActiveGAMER最重要的创新点在于将3DGS的高效渲染能力与主动映射相结合。与传统的基于NeRF的方法相比,3DGS的渲染速度更快,使得系统能够更快速地评估不同视点的信息量,从而实现更高效的探索和重建。此外,基于渲染的信息增益模块能够更准确地评估视点的信息量,从而提高重建质量。
关键设计:ActiveGAMER的关键设计包括:1) 信息增益的计算方式,采用基于渲染的差异度量;2) 粗到精探索策略的具体实现,包括全局探索的范围和局部细化的策略;3) 全局-局部关键帧选择策略,包括全局关键帧的选取频率和局部关键帧的选取标准;4) 后细化模块的优化目标和算法。
🖼️ 关键图片
📊 实验亮点
ActiveGAMER在Replica和MP3D数据集上进行了广泛的实验评估,结果表明,该系统在几何和光度精度以及完整性方面均显著优于现有方法。具体而言,ActiveGAMER在重建完整性方面提升了XX%,在重建精度方面提升了YY%,证明了其在主动映射任务中的有效性。
🎯 应用场景
ActiveGAMER具有广泛的应用前景,例如机器人自主导航、虚拟现实/增强现实场景构建、三维地图重建、以及工业自动化等领域。该系统能够帮助机器人在未知环境中进行高效探索和精确建模,为实现更智能化的自主系统提供有力支持。未来,该技术有望应用于自动驾驶、无人机巡检、以及灾后救援等场景。
📄 摘要(原文)
We introduce ActiveGAMER, an active mapping system that utilizes 3D Gaussian Splatting (3DGS) to achieve high-quality, real-time scene mapping and exploration. Unlike traditional NeRF-based methods, which are computationally demanding and restrict active mapping performance, our approach leverages the efficient rendering capabilities of 3DGS, allowing effective and efficient exploration in complex environments. The core of our system is a rendering-based information gain module that dynamically identifies the most informative viewpoints for next-best-view planning, enhancing both geometric and photometric reconstruction accuracy. ActiveGAMER also integrates a carefully balanced framework, combining coarse-to-fine exploration, post-refinement, and a global-local keyframe selection strategy to maximize reconstruction completeness and fidelity. Our system autonomously explores and reconstructs environments with state-of-the-art geometric and photometric accuracy and completeness, significantly surpassing existing approaches in both aspects. Extensive evaluations on benchmark datasets such as Replica and MP3D highlight ActiveGAMER's effectiveness in active mapping tasks.