Relative Pose Estimation through Affine Corrections of Monocular Depth Priors
作者: Yifan Yu, Shaohui Liu, Rémi Pautrat, Marc Pollefeys, Viktor Larsson
分类: cs.CV
发布日期: 2025-01-09 (更新: 2025-04-08)
备注: CVPR 2025 (Highlight)
🔗 代码/项目: GITHUB
💡 一句话要点
提出基于仿射校正的单目深度先验相对位姿估计方法,显著提升位姿估计精度。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 相对位姿估计 单目深度估计 仿射校正 几何视觉 三维重建
📋 核心要点
- 单目深度估计的噪声和模糊性限制了其在相对位姿估计中的应用,传统方法难以有效利用深度信息。
- 论文提出显式考虑仿射模糊性的相对位姿估计求解器,并结合经典方法,形成混合估计流程。
- 实验表明,该方法在多个数据集上显著优于传统方法,且能与不同的特征匹配器和深度估计模型结合。
📝 摘要(中文)
近年来,单目深度估计(MDE)模型取得了显著进展。许多MDE模型旨在从单目图像中预测仿射不变的相对深度,而大规模训练和视觉基础模型的最新发展使得合理估计度量(绝对)深度成为可能。然而,如何有效地利用这些预测进行几何视觉任务,特别是相对位姿估计,仍然相对欠探索。虽然深度信息为跨视图图像对齐提供了丰富的约束,但来自单目深度先验的内在噪声和模糊性给改进经典基于关键点的解决方案带来了实际挑战。本文开发了三种用于相对位姿估计的求解器,这些求解器显式地考虑了独立的仿射(尺度和偏移)模糊性,涵盖了校准和未校准的情况。我们进一步提出了一种混合估计流程,该流程将我们提出的求解器与经典的基于点的求解器和对极约束相结合。我们发现仿射校正建模不仅有利于相对深度先验,而且令人惊讶地也有利于“度量”深度先验。在多个数据集上的结果表明,在校准和未校准设置下,我们的方法相对于经典的基于关键点的基线和基于PnP的解决方案都有了很大的改进。我们还表明,我们的方法在不同的特征匹配器和MDE模型下都能持续改进,并且可以进一步受益于这两个模块的最新进展。
🔬 方法详解
问题定义:论文旨在解决如何有效利用单目深度估计结果进行相对位姿估计的问题。现有方法,如基于关键点的算法,难以充分利用深度信息,且容易受到单目深度估计结果中存在的噪声和仿射模糊性的影响。直接使用深度信息进行PnP(Perspective-n-Point)求解,精度提升有限。
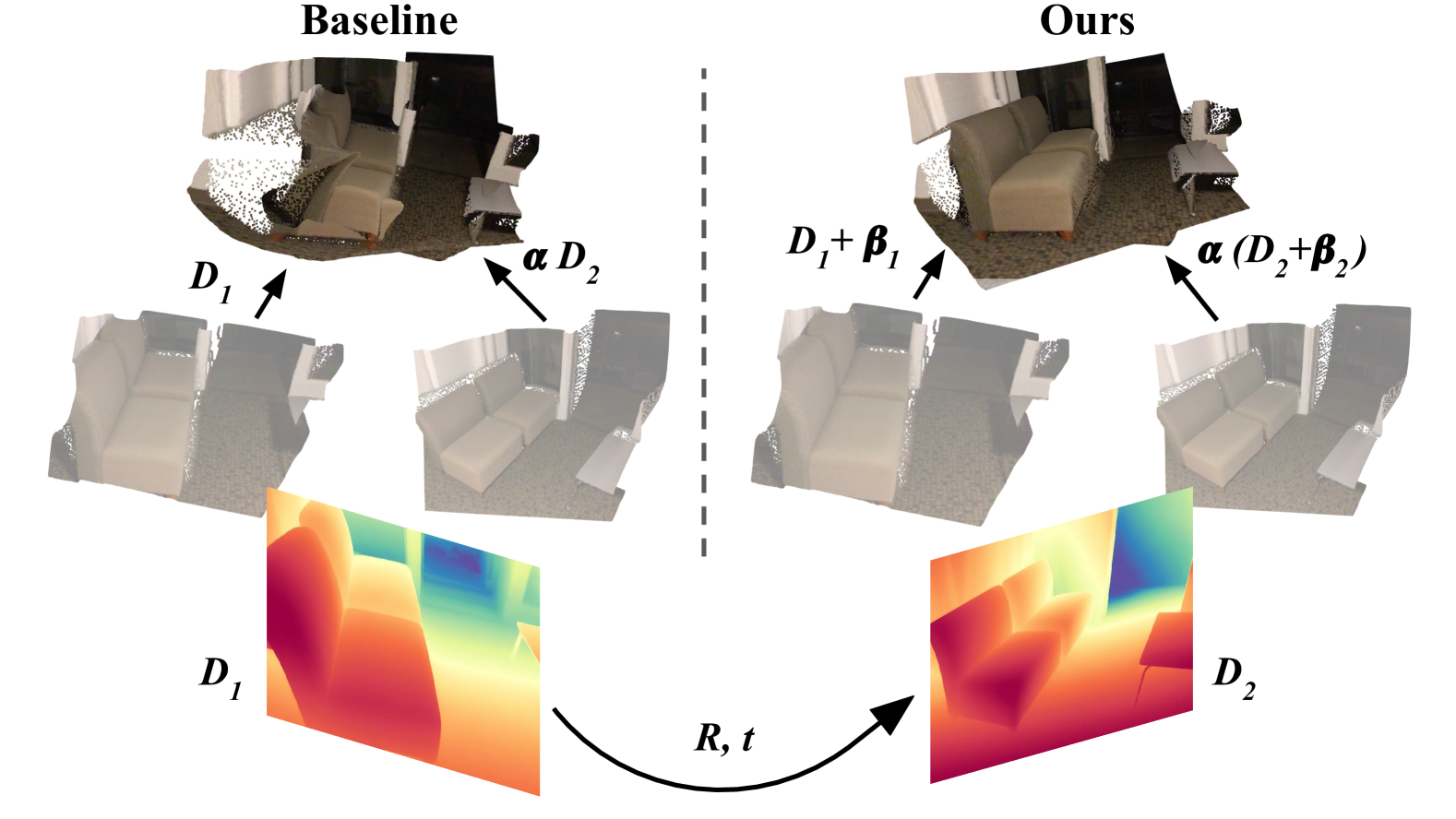
核心思路:论文的核心思路是显式地建模并校正单目深度估计结果中的仿射模糊性(尺度和偏移),从而更准确地利用深度信息进行相对位姿估计。通过设计专门的求解器,将仿射变换作为优化变量,从而在位姿估计过程中消除深度信息的歧义。
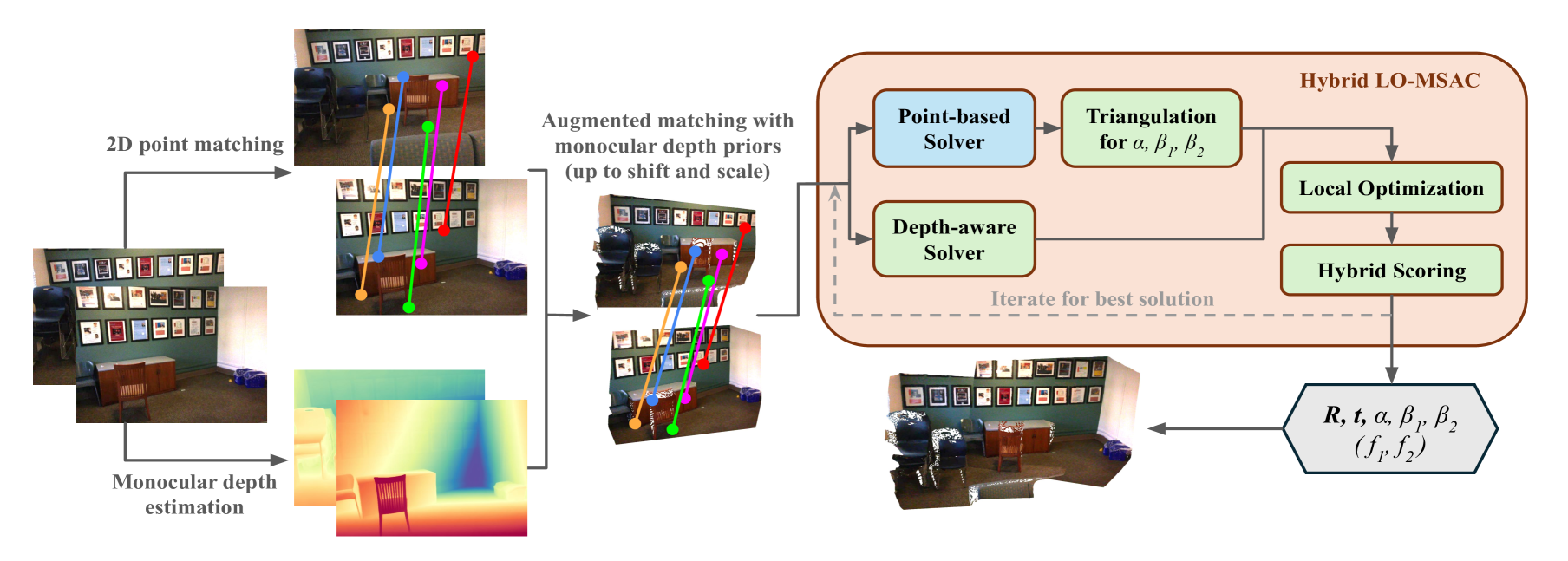
技术框架:整体流程包括以下几个主要步骤:1) 使用单目深度估计模型预测图像的深度图;2) 使用特征匹配算法在两幅图像之间建立对应关系;3) 使用论文提出的三种求解器(分别针对校准和未校准相机)进行相对位姿估计,这些求解器显式地考虑了仿射模糊性;4) 将这些求解器的结果与基于关键点的传统方法以及对极约束相结合,形成混合估计流程,进一步提高位姿估计的精度。
关键创新:最重要的技术创新点在于提出了显式建模仿射模糊性的相对位姿估计求解器。与传统方法不同,该方法不是直接使用深度值,而是将深度值视为带有仿射变换的先验信息,并在位姿估计过程中同时优化位姿和仿射变换参数。这种方法能够有效地消除深度信息中的歧义,从而提高位姿估计的精度。
关键设计:论文设计了三种求解器,分别针对不同的相机校准情况。这些求解器都基于最小化重投影误差,并将仿射变换参数(尺度和偏移)作为优化变量。损失函数的设计考虑了深度信息的置信度,例如,可以根据深度估计的不确定性对不同的深度值赋予不同的权重。此外,混合估计流程的设计也至关重要,它将不同方法的优点结合起来,进一步提高了位姿估计的鲁棒性和精度。
🖼️ 关键图片
📊 实验亮点
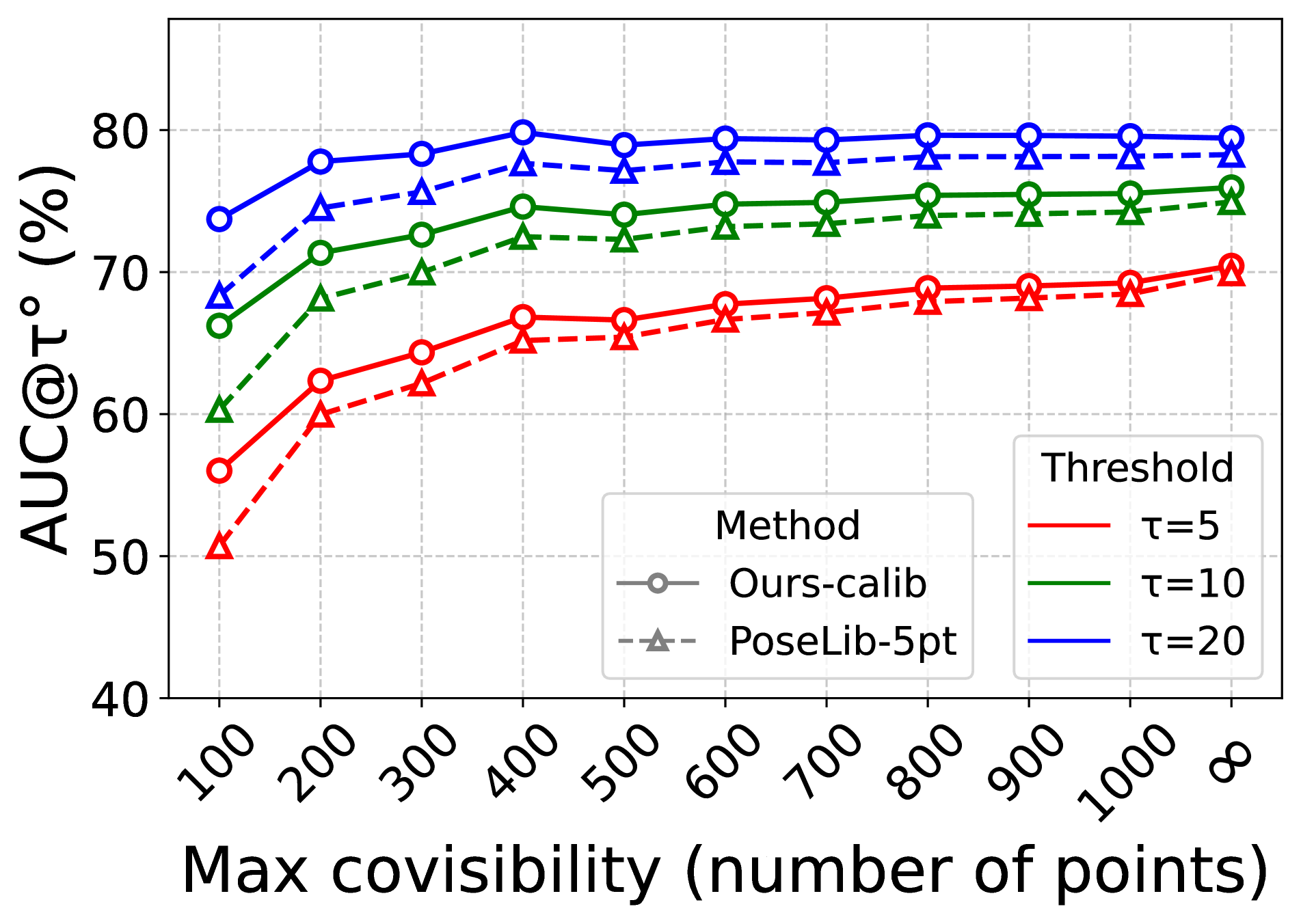
实验结果表明,该方法在多个数据集上显著优于传统的基于关键点的基线方法和基于PnP的解决方案。例如,在某些数据集上,相对位姿估计的精度提高了超过20%。此外,该方法对不同的特征匹配器和单目深度估计模型具有良好的适应性,并且可以进一步受益于这些模块的最新进展。
🎯 应用场景
该研究成果可应用于增强现实、机器人导航、三维重建等领域。在增强现实中,更精确的位姿估计可以提高虚拟物体的定位精度和稳定性。在机器人导航中,可以帮助机器人更准确地感知周围环境,从而实现更可靠的自主导航。在三维重建中,可以提高重建模型的精度和完整性。
📄 摘要(原文)
Monocular depth estimation (MDE) models have undergone significant advancements over recent years. Many MDE models aim to predict affine-invariant relative depth from monocular images, while recent developments in large-scale training and vision foundation models enable reasonable estimation of metric (absolute) depth. However, effectively leveraging these predictions for geometric vision tasks, in particular relative pose estimation, remains relatively under explored. While depths provide rich constraints for cross-view image alignment, the intrinsic noise and ambiguity from the monocular depth priors present practical challenges to improving upon classic keypoint-based solutions. In this paper, we develop three solvers for relative pose estimation that explicitly account for independent affine (scale and shift) ambiguities, covering both calibrated and uncalibrated conditions. We further propose a hybrid estimation pipeline that combines our proposed solvers with classic point-based solvers and epipolar constraints. We find that the affine correction modeling is beneficial to not only the relative depth priors but also, surprisingly, the "metric" ones. Results across multiple datasets demonstrate large improvements of our approach over classic keypoint-based baselines and PnP-based solutions, under both calibrated and uncalibrated setups. We also show that our method improves consistently with different feature matchers and MDE models, and can further benefit from very recent advances on both modules. Code is available at https://github.com/MarkYu98/madpose.