Cross-PCR: A Robust Cross-Source Point Cloud Registration Framework
作者: Guiyu Zhao, Zhentao Guo, Zewen Du, Hongbin Ma
分类: cs.CV
发布日期: 2024-12-25
备注: Accepted by AAAI 2025
💡 一句话要点
提出Cross-PCR框架,解决跨源点云配准中密度不一致和分布差异问题
🎯 匹配领域: 支柱六:视频提取与匹配 (Video Extraction)
关键词: 点云配准 跨源数据 密度鲁棒 特征提取 对应关系匹配
📋 核心要点
- 现有跨源点云配准方法难以应对密度不一致和分布差异带来的挑战。
- Cross-PCR采用密度鲁棒的特征提取和松散生成、严格选择的匹配策略。
- 实验表明,该方法在跨源数据集上显著提升了特征匹配和配准的召回率。
📝 摘要(中文)
针对跨源点云配准中存在的密度不一致和分布差异问题,现有方法表现不佳。本文提出了一种密度鲁棒的特征提取和匹配方案,以实现稳健而精确的跨源配准。为了解决跨源数据之间的密度不一致问题,我们引入了一个密度鲁棒的编码器来提取密度鲁棒的特征。为了解决特征匹配困难和正确对应关系少的问题,我们采用了一种由松到严的匹配流程,其核心思想是“松散生成,严格选择”。在该流程下,我们采用一对多的策略来松散地生成初始对应关系。随后,通过稀疏匹配和密集匹配严格选择高质量的对应关系,以实现稳健的配准。在具有挑战性的3DCSR数据集中Kinect-LiDAR场景上,我们的方法将特征匹配召回率提高了63.5个百分点(pp),并将配准召回率提高了57.6个百分点。它还在3DMatch上实现了最佳性能,同时在不同的下采样密度下保持了鲁棒性。
🔬 方法详解
问题定义:跨源点云配准旨在将来自不同传感器(如激光雷达和深度相机)的点云数据对齐。现有方法在处理跨源数据时,由于点云密度不一致和分布差异较大,导致特征提取和匹配的准确性显著下降,最终影响配准效果。现有方法难以有效提取鲁棒特征,且容易产生大量错误的对应关系。
核心思路:本文的核心思路是设计一种密度鲁棒的特征提取器,并采用一种由松到严的匹配策略。密度鲁棒的特征提取器能够有效应对不同密度点云带来的特征差异,而松到严的匹配策略则可以在初始阶段生成尽可能多的候选对应关系,然后在后续阶段严格筛选,从而提高正确对应关系的比例。
技术框架:Cross-PCR框架主要包含以下几个阶段:1) 密度鲁棒特征提取:使用密度鲁棒的编码器提取点云特征。2) 初始对应关系生成:采用一对多的策略,为每个源点云中的点生成多个目标点云中的候选对应点。3) 稀疏匹配:利用几何约束等信息,从初始对应关系中筛选出高质量的稀疏对应关系。4) 密集匹配:基于稀疏对应关系,进一步生成密集的对应关系,并进行最终的配准。
关键创新:该方法最重要的创新点在于密度鲁棒的特征提取器和松到严的匹配策略。密度鲁棒的特征提取器能够有效应对跨源点云密度差异带来的挑战,而松到严的匹配策略则可以在保证召回率的同时提高匹配的准确率。与现有方法相比,Cross-PCR能够更有效地提取跨源点云的特征,并建立更准确的对应关系。
关键设计:密度鲁棒编码器的具体结构未知,但其设计目标是提取对点云密度变化不敏感的特征。松到严的匹配策略中,稀疏匹配阶段可能采用了RANSAC等方法来剔除外点。损失函数的设计也未知,但可能包含对应点之间的距离损失和正则化项,以保证配准的准确性和平滑性。
🖼️ 关键图片


📊 实验亮点
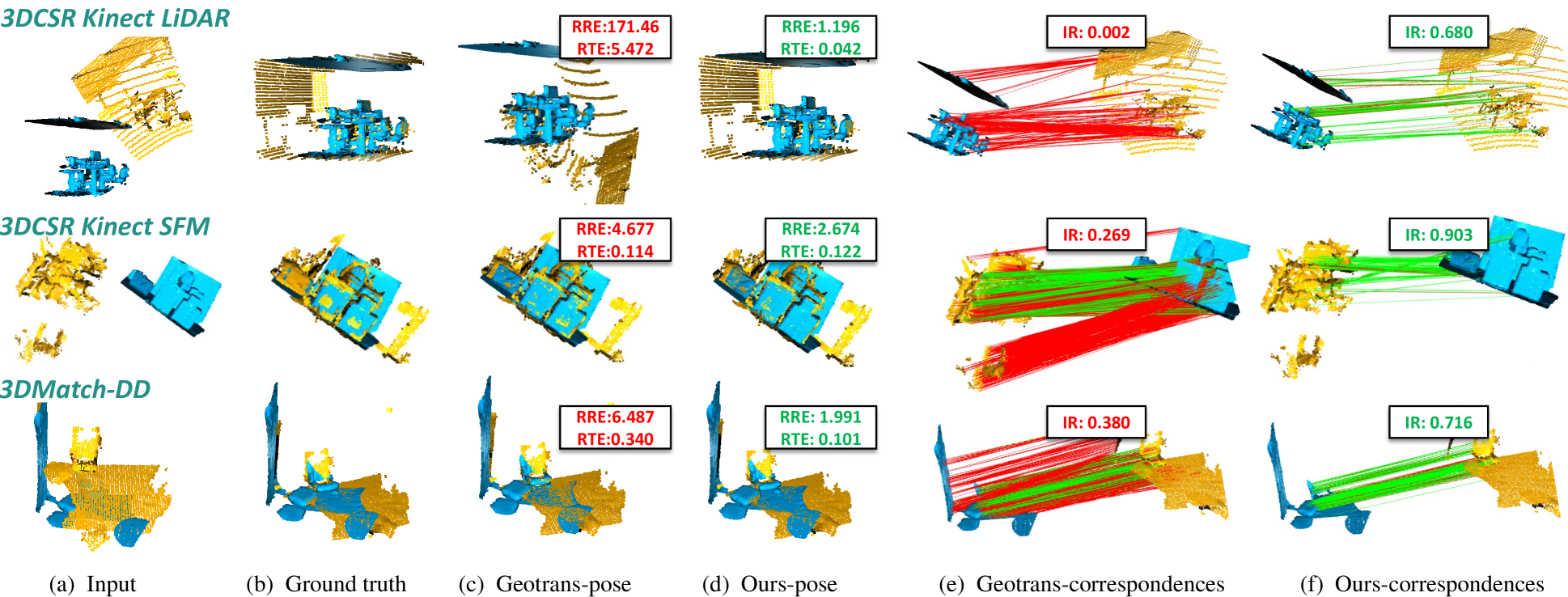
在3DCSR数据集的Kinect-LiDAR场景中,Cross-PCR将特征匹配召回率提高了63.5个百分点,配准召回率提高了57.6个百分点。此外,该方法在3DMatch数据集上也取得了最佳性能,并且在不同的下采样密度下保持了鲁棒性。这些结果表明,Cross-PCR在跨源点云配准方面具有显著的优势。
🎯 应用场景
Cross-PCR框架可应用于自动驾驶、机器人导航、三维重建等领域。在自动驾驶中,可以融合激光雷达和相机数据,提高环境感知的准确性和鲁棒性。在机器人导航中,可以实现不同传感器数据的融合,提高定位和地图构建的精度。在三维重建中,可以利用不同来源的点云数据,生成更完整、更精确的三维模型。
📄 摘要(原文)
Due to the density inconsistency and distribution difference between cross-source point clouds, previous methods fail in cross-source point cloud registration. We propose a density-robust feature extraction and matching scheme to achieve robust and accurate cross-source registration. To address the density inconsistency between cross-source data, we introduce a density-robust encoder for extracting density-robust features. To tackle the issue of challenging feature matching and few correct correspondences, we adopt a loose-to-strict matching pipeline with a ``loose generation, strict selection'' idea. Under it, we employ a one-to-many strategy to loosely generate initial correspondences. Subsequently, high-quality correspondences are strictly selected to achieve robust registration through sparse matching and dense matching. On the challenging Kinect-LiDAR scene in the cross-source 3DCSR dataset, our method improves feature matching recall by 63.5 percentage points (pp) and registration recall by 57.6 pp. It also achieves the best performance on 3DMatch, while maintaining robustness under diverse downsampling densities.