Planning from Imagination: Episodic Simulation and Episodic Memory for Vision-and-Language Navigation
作者: Yiyuan Pan, Yunzhe Xu, Zhe Liu, Hesheng Wang
分类: cs.CV, cs.LG, cs.RO
发布日期: 2024-11-30 (更新: 2024-12-25)
💡 一句话要点
提出基于情景模拟和情景记忆的混合记忆系统,提升视觉-语言导航任务性能。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 视觉语言导航 情景记忆 情景模拟 混合记忆系统 机器人导航
📋 核心要点
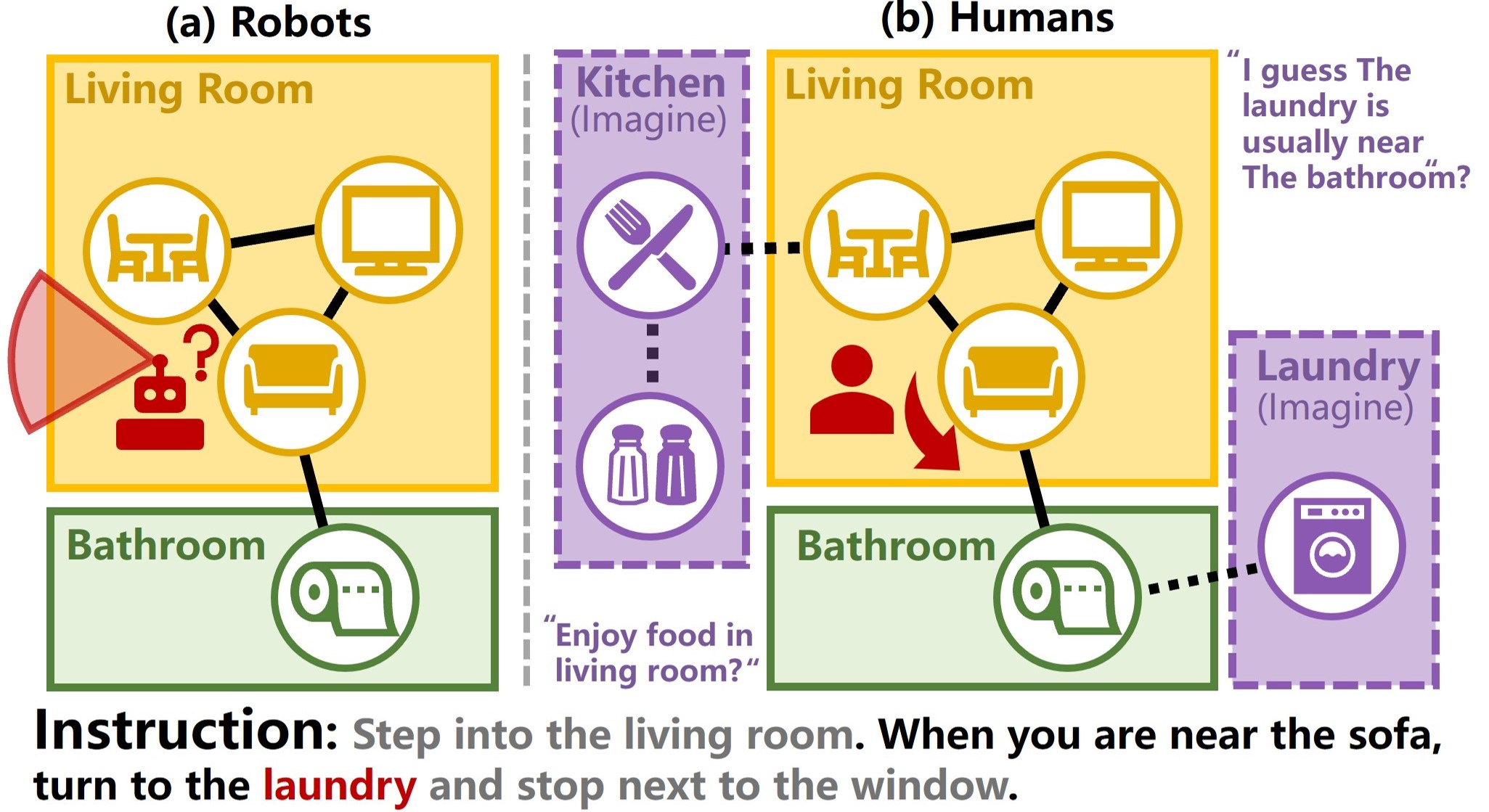
- 现有VLN智能体缺乏类似人类的情景记忆机制,难以有效理解环境和物体间的复杂关系。
- 本文提出现实-想象混合记忆系统,通过想象机制和导航动作扩展智能体的记忆。
- 通过定制的预训练任务提升智能体的想象能力,并在SPL指标上取得SOTA结果。
📝 摘要(中文)
本文提出了一种新颖的架构,为视觉-语言导航(VLN)智能体配备了现实-想象混合记忆系统。该系统使智能体能够通过想象机制和导航动作来维护和扩展其记忆,从而更深入地理解环境和物体之间的复杂关系。此外,本文还设计了定制的预训练任务,以发展智能体的想象能力。实验结果表明,该智能体能够想象出高保真度的未来场景RGB图像,并在路径长度加权成功率(SPL)指标上取得了最先进的结果。
🔬 方法详解
问题定义:现有的视觉-语言导航(VLN)智能体在未见过的环境中导航时,缺乏有效的记忆机制来理解环境和物体之间的复杂关系。它们难以利用过去的经验进行推理和规划,导致导航性能受限。尤其是在复杂和动态的环境中,这种缺陷更加明显。
核心思路:本文的核心思路是借鉴人类的导航方式,即利用情景模拟和情景记忆来增强智能体的导航能力。通过构建一个现实-想象混合记忆系统,智能体可以维护和扩展其记忆,并利用想象能力来预测未来的场景,从而更好地进行导航决策。
技术框架:该架构包含一个现实记忆模块和一个想象记忆模块。现实记忆模块用于存储智能体在实际导航过程中观察到的信息,而想象记忆模块则用于存储智能体通过想象生成的未来场景信息。智能体首先利用视觉和语言输入来更新现实记忆,然后利用现实记忆来生成未来的场景图像,并将这些图像存储在想象记忆中。在导航决策时,智能体会同时考虑现实记忆和想象记忆,选择最佳的导航动作。
关键创新:本文最重要的技术创新点在于提出了现实-想象混合记忆系统,该系统能够有效地结合现实经验和想象能力,从而提升智能体的导航性能。与现有方法相比,该系统能够更好地理解环境和物体之间的关系,并能够利用想象能力来预测未来的场景,从而做出更明智的导航决策。
关键设计:为了训练智能体的想象能力,本文设计了定制的预训练任务,包括图像生成任务和场景预测任务。图像生成任务要求智能体根据给定的文本描述生成对应的图像,而场景预测任务则要求智能体根据当前的场景图像和导航动作预测未来的场景图像。此外,本文还使用了强化学习算法来优化智能体的导航策略,并使用了路径长度加权成功率(SPL)作为评估指标。
🖼️ 关键图片


📊 实验亮点
实验结果表明,本文提出的方法在视觉-语言导航任务中取得了显著的性能提升,在SPL指标上达到了最先进水平。具体来说,该方法在未见过的环境中导航时,能够更准确地理解环境和物体之间的关系,并能够利用想象能力来预测未来的场景,从而做出更明智的导航决策。相较于基线模型,SPL指标提升明显。
🎯 应用场景
该研究成果可应用于机器人导航、自动驾驶、虚拟现实等领域。例如,在机器人导航中,智能体可以利用该方法在未知环境中进行自主探索和导航;在自动驾驶中,智能体可以利用该方法预测其他车辆和行人的行为,从而提高驾驶安全性;在虚拟现实中,智能体可以利用该方法生成逼真的虚拟环境,从而增强用户的沉浸感。
📄 摘要(原文)
Humans navigate unfamiliar environments using episodic simulation and episodic memory, which facilitate a deeper understanding of the complex relationships between environments and objects. Developing an imaginative memory system inspired by human mechanisms can enhance the navigation performance of embodied agents in unseen environments. However, existing Vision-and-Language Navigation (VLN) agents lack a memory mechanism of this kind. To address this, we propose a novel architecture that equips agents with a reality-imagination hybrid memory system. This system enables agents to maintain and expand their memory through both imaginative mechanisms and navigation actions. Additionally, we design tailored pre-training tasks to develop the agent's imaginative capabilities. Our agent can imagine high-fidelity RGB images for future scenes, achieving state-of-the-art result in Success rate weighted by Path Length (SPL).