DROID-Splat: Combining end-to-end SLAM with 3D Gaussian Splatting
作者: Christian Homeyer, Leon Begiristain, Christoph Schnörr
分类: cs.CV
发布日期: 2024-11-26 (更新: 2024-11-29)
🔗 代码/项目: GITHUB
💡 一句话要点
DroidSplat:结合端到端SLAM与3D高斯溅射,实现SOTA级跟踪与渲染。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: SLAM 3D高斯溅射 端到端学习 可微渲染 单目视觉
📋 核心要点
- 现有基于优化的超基元的SLAM系统在跟踪性能上仍落后于传统和端到端SLAM系统,尤其是在单目视频中,鲁棒性、速度和精度之间尚未达到最佳平衡。
- DroidSplat的核心在于结合了端到端跟踪器和基于3D高斯溅射的渲染器,从而在跟踪和渲染两方面都实现了最先进的性能。
- 该系统通过并行化现代SLAM系统的多个模块,实现了在消费级GPU上的快速推理,并且在未知相机内参的真实数据上也能取得良好效果。
📝 摘要(中文)
本文提出了一种基于端到端跟踪器的SLAM系统,并使用最新的3D高斯溅射技术扩展了渲染器。该框架DroidSplat在常见的SLAM基准测试中实现了最先进的跟踪和渲染效果。通过并行运行现代SLAM系统的多个构建块,实现了在常见消费级GPU上的快速推理。单目深度预测和相机标定的最新进展使得该系统即使在没有已知相机内参的真实数据上也能取得优异的结果。代码将在https://github.com/ChenHoy/DROID-Splat上提供。
🔬 方法详解
问题定义:现有的SLAM系统,特别是单目SLAM,在鲁棒性、速度和精度之间难以达到理想的平衡。基于超基元的SLAM系统在跟踪性能上仍有不足,尤其是在真实场景和未知相机内参的情况下表现不佳。
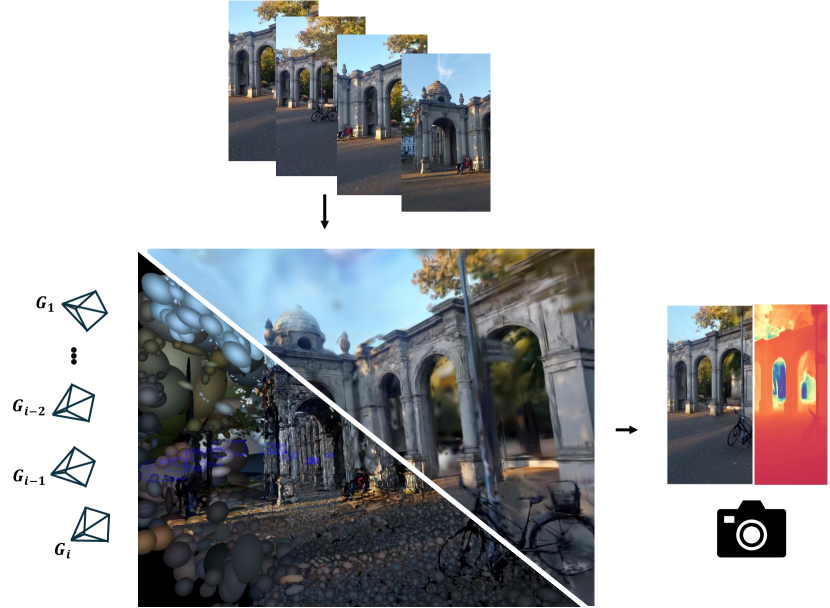
核心思路:DroidSplat的核心思路是将端到端的可微跟踪器与基于3D高斯溅射的渲染器相结合。端到端跟踪器负责提供鲁棒的位姿估计,而3D高斯溅射则用于高质量的场景渲染。通过可微渲染,跟踪器可以直接优化渲染质量,从而提高跟踪精度。
技术框架:DroidSplat系统主要包含两个核心模块:端到端跟踪器和3D高斯溅射渲染器。跟踪器负责估计相机的位姿,并将位姿信息传递给渲染器。渲染器使用3D高斯溅射技术将场景渲染成图像,并计算渲染损失。跟踪器根据渲染损失调整位姿估计,从而实现端到端的优化。系统还包含并行处理模块,以提高推理速度。
关键创新:DroidSplat的关键创新在于将端到端跟踪器与3D高斯溅射渲染器无缝集成。传统的SLAM系统通常将跟踪和渲染作为独立的步骤进行处理,而DroidSplat通过可微渲染将两者连接起来,实现了联合优化。此外,系统还采用了并行处理技术,提高了推理速度。
关键设计:跟踪器可能基于光流或深度估计等技术,并采用卷积神经网络进行特征提取和位姿估计。3D高斯溅射渲染器使用一组3D高斯分布来表示场景,并通过可微渲染技术将这些高斯分布投影到图像平面上。损失函数可能包括光度损失、深度损失和正则化项,用于约束位姿估计和场景表示。
🖼️ 关键图片
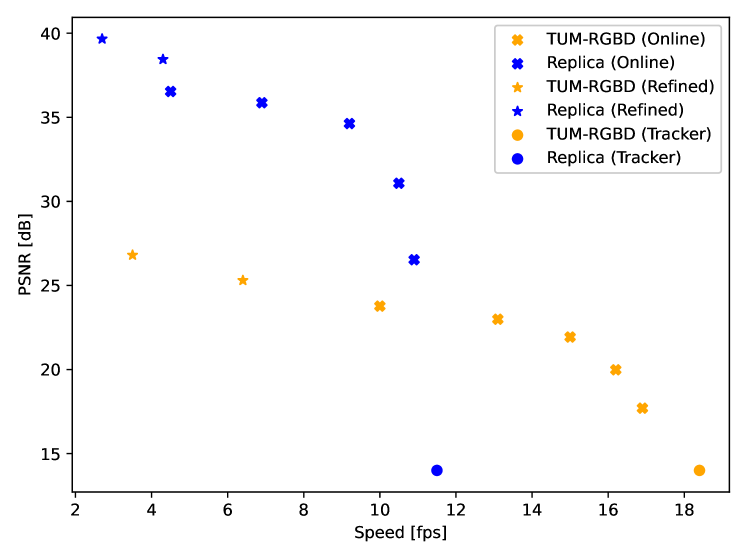
📊 实验亮点
DroidSplat在常见的SLAM基准测试中取得了最先进的跟踪和渲染效果。论文中提到,该系统在没有已知相机内参的真实数据上也能取得优异的结果,这表明该系统具有很强的鲁棒性和泛化能力。具体的性能数据和对比基线将在论文的实验部分详细展示。
🎯 应用场景
DroidSplat具有广泛的应用前景,包括增强现实、虚拟现实、机器人导航、自动驾驶等领域。该系统可以用于构建高精度的三维地图,并实现实时的场景渲染和跟踪。此外,该系统还可以应用于三维重建、物体识别和场景理解等任务,为相关领域的研究和应用提供有力的支持。
📄 摘要(原文)
Recent progress in scene synthesis makes standalone SLAM systems purely based on optimizing hyperprimitives with a Rendering objective possible. However, the tracking performance still lacks behind traditional and end-to-end SLAM systems. An optimal trade-off between robustness, speed and accuracy has not yet been reached, especially for monocular video. In this paper, we introduce a SLAM system based on an end-to-end Tracker and extend it with a Renderer based on recent 3D Gaussian Splatting techniques. Our framework \textbf{DroidSplat} achieves both SotA tracking and rendering results on common SLAM benchmarks. We implemented multiple building blocks of modern SLAM systems to run in parallel, allowing for fast inference on common consumer GPU's. Recent progress in monocular depth prediction and camera calibration allows our system to achieve strong results even on in-the-wild data without known camera intrinsics. Code will be available at \url{https://github.com/ChenHoy/DROID-Splat}.