Puzzle Similarity: A Perceptually-guided Cross-Reference Metric for Artifact Detection in 3D Scene Reconstructions
作者: Nicolai Hermann, Jorge Condor, Piotr Didyk
分类: cs.CV, cs.AI, cs.GR, cs.LG
发布日期: 2024-11-26 (更新: 2025-07-29)
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出Puzzle Similarity,用于3D重建中无参考伪影检测,提升重建质量。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 三维重建 伪影检测 图像质量评估 交叉参考指标 无参考质量评价
📋 核心要点
- 现有3D重建质量评估方法依赖ground truth或无参考指标,但在伪影定位方面存在局限性。
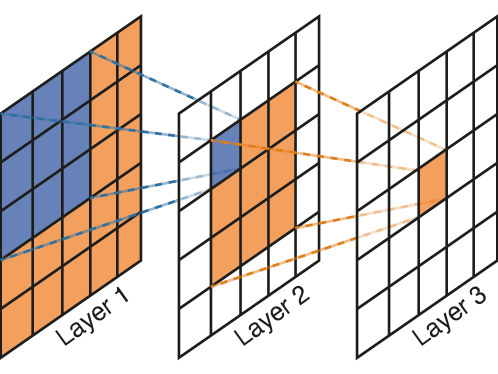
- Puzzle Similarity利用训练视角的图像块统计信息,构建场景特定分布,从而定位新视角中的伪影。
- 通过人工标注数据集验证,该方法在伪影定位方面达到SOTA,并可应用于图像恢复和引导采集。
📝 摘要(中文)
现代重建技术能够有效地从稀疏的2D视图中建模复杂的3D场景。然而,由于缺乏ground truth图像以及无参考图像质量评价指标在预测可靠伪影图方面的局限性,自动评估新视角的质量和识别伪影仍然具有挑战性。缺乏此类指标阻碍了对新视角质量的评估,并限制了诸如图像修复等后处理技术的应用,以提高重建质量。为了解决这个问题,最近的研究建立了一种新的指标类别(交叉参考),仅通过利用来自备选视点的上下文来预测图像质量。在这项工作中,我们提出了一种新的交叉参考指标,Puzzle Similarity,旨在定位新视角中的伪影。我们的方法利用训练视角的图像块统计信息来建立场景特定的分布,随后用于识别新视角中重建不良的区域。鉴于缺乏良好的度量标准来评估3D重建中的交叉参考方法,我们收集了一个新的带有人工标注的数据集,包含未见重建视角中的伪影和失真图。通过这个数据集,我们证明了我们的方法实现了最先进的新视角伪影定位,与人类评估相关,即使没有对齐的参考。我们可以利用我们的新指标来增强诸如自动图像恢复、引导采集或从稀疏输入进行3D重建等应用。
🔬 方法详解
问题定义:论文旨在解决3D场景重建中,缺乏有效且准确的伪影检测方法的问题。现有的无参考图像质量评价指标在预测可靠的伪影图方面存在局限性,难以准确地定位重建图像中的伪影。这阻碍了对重建质量的有效评估,并限制了后处理技术(如图像修复)的应用。
核心思路:论文的核心思路是利用训练视角中的图像块统计信息,构建一个场景特定的分布。这个分布代表了场景中正常图像块的特征。然后,将新视角中的图像块与这个分布进行比较,偏离分布较大的图像块被认为是潜在的伪影区域。这种方法的核心在于利用场景自身的统计信息来判断重建质量,而不需要额外的ground truth。
技术框架:该方法主要包含以下几个阶段:1) 从训练视角中提取图像块,并计算其统计特征(例如,均值、方差等)。2) 利用这些统计特征构建场景特定的分布。3) 对于新的视角,提取图像块并计算其统计特征。4) 将新视角的图像块特征与场景分布进行比较,计算一个相似度得分。5) 根据相似度得分,生成伪影图,其中低相似度区域对应于潜在的伪影。
关键创新:该方法的关键创新在于提出了一种基于图像块统计信息的交叉参考指标,称为Puzzle Similarity。与传统的无参考图像质量评价指标不同,Puzzle Similarity利用训练视角的信息来建立场景特定的先验知识,从而更准确地检测伪影。这种方法避免了对ground truth的依赖,并且能够更好地适应不同的场景。
关键设计:论文的关键设计包括:1) 如何选择合适的图像块大小和统计特征,以有效地表示场景的特征。2) 如何构建场景特定的分布,例如,可以使用高斯混合模型或其他概率模型。3) 如何定义相似度得分,以衡量新视角图像块与场景分布之间的差异。4) 如何利用伪影图来指导图像修复或其他后处理操作。具体的参数设置和网络结构(如果使用)在论文中应该有详细描述,但摘要中未提及。
🖼️ 关键图片


📊 实验亮点
论文通过在新建的人工标注数据集上进行实验,证明了Puzzle Similarity方法在伪影定位方面达到了最先进的水平。该方法能够有效地检测和定位重建图像中的伪影,并且与人类的感知评估具有很高的相关性。即使在没有对齐参考图像的情况下,该方法也能够准确地识别伪影区域。具体的性能数据和对比基线需要在论文中查找。
🎯 应用场景
该研究成果可广泛应用于三维重建、虚拟现实、增强现实等领域。通过自动检测和定位重建图像中的伪影,可以提高重建质量,改善用户体验。此外,该方法还可以用于引导图像采集过程,例如,在重建过程中自动选择最佳视角,以减少伪影的产生。未来,该技术有望应用于自动驾驶、机器人导航等领域,提高环境感知的准确性和可靠性。
📄 摘要(原文)
Modern reconstruction techniques can effectively model complex 3D scenes from sparse 2D views. However, automatically assessing the quality of novel views and identifying artifacts is challenging due to the lack of ground truth images and the limitations of no-reference image metrics in predicting reliable artifact maps. The absence of such metrics hinders assessment of the quality of novel views and limits the adoption of post-processing techniques, such as inpainting, to enhance reconstruction quality. To tackle this, recent work has established a new category of metrics (cross-reference), predicting image quality solely by leveraging context from alternate viewpoint captures (arXiv:2404.14409). In this work, we propose a new cross-reference metric, Puzzle Similarity, which is designed to localize artifacts in novel views. Our approach utilizes image patch statistics from the training views to establish a scene-specific distribution, later used to identify poorly reconstructed regions in the novel views. Given the lack of good measures to evaluate cross-reference methods in the context of 3D reconstruction, we collected a novel human-labeled dataset of artifact and distortion maps in unseen reconstructed views. Through this dataset, we demonstrate that our method achieves state-of-the-art localization of artifacts in novel views, correlating with human assessment, even without aligned references. We can leverage our new metric to enhance applications like automatic image restoration, guided acquisition, or 3D reconstruction from sparse inputs. Find the project page at https://nihermann.github.io/puzzlesim/ .