Curvature Informed Furthest Point Sampling
作者: Shubham Bhardwaj, Ashwin Vinod, Soumojit Bhattacharya, Aryan Koganti, Aditya Sai Ellendula, Balakrishna Reddy
分类: cs.CV
发布日期: 2024-11-25
备注: 19 pages, 5 figures
💡 一句话要点
提出曲率引导的强化学习FPS采样算法,提升点云处理任务性能
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 点云处理 最远点采样 强化学习 曲率估计 几何特征
📋 核心要点
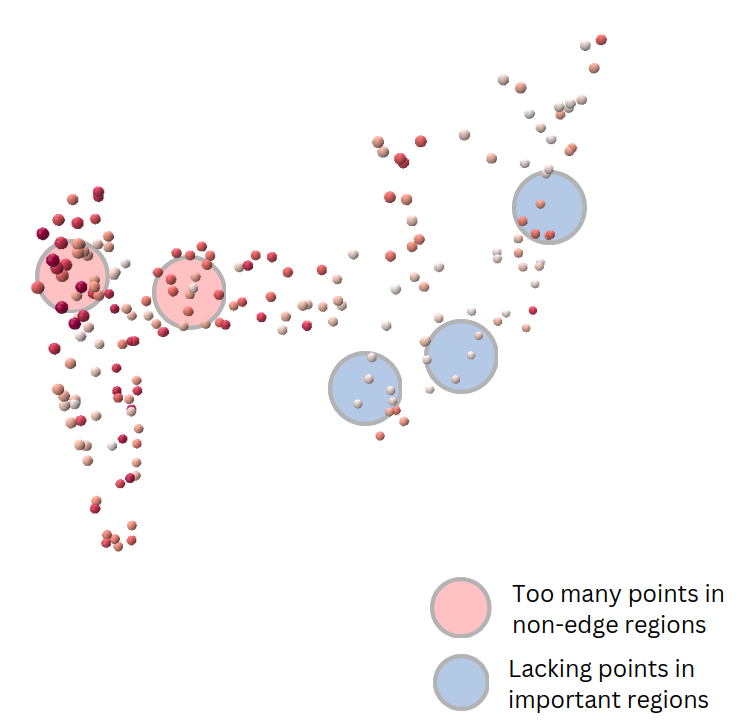
- 传统FPS采样忽略点云的几何特征(如曲率),影响下游任务性能。
- 提出基于强化学习的曲率引导FPS采样,融合曲率信息优化采样结果。
- 实验表明,该方法在分类、分割和形状补全任务上优于现有方法,实现SOTA。
📝 摘要(中文)
点云表示因其高效的内存使用和采集、操作及存储的简易性而备受关注。然而,随着点云规模的增大,有效的下采样对于满足下游任务的计算需求至关重要。传统方法,如最远点采样(FPS),在基准测试中表现良好,但依赖于启发式方法,并且在下采样过程中忽略了诸如曲率之类的几何特征。本文提出了一种基于强化学习的采样算法,通过整合曲率信息来增强FPS。我们的方法通过结合FPS导出的软排序和深度神经网络计算的曲率分数来对点进行排序,从而允许我们将FPS集合中一部分低曲率点替换为未选择集合中的高曲率点。现有的可微采样技术通常存在训练不稳定的问题,阻碍了它们集成到端到端学习框架中。相比之下,我们的方法实现了稳定的端到端学习,并在多个下游几何处理任务中始终优于基线模型。我们提供了全面的消融研究,包括对每个特征对性能影响的定性和定量分析。我们的算法在分类、分割和形状补全方面取得了最先进的结果,展示了其鲁棒性和适应性。
🔬 方法详解
问题定义:论文旨在解决点云下采样过程中,传统最远点采样(FPS)方法忽略几何特征(如曲率)的问题。现有FPS方法依赖启发式规则,无法有效保留点云的关键几何信息,从而影响下游任务(如分类、分割、形状补全)的性能。
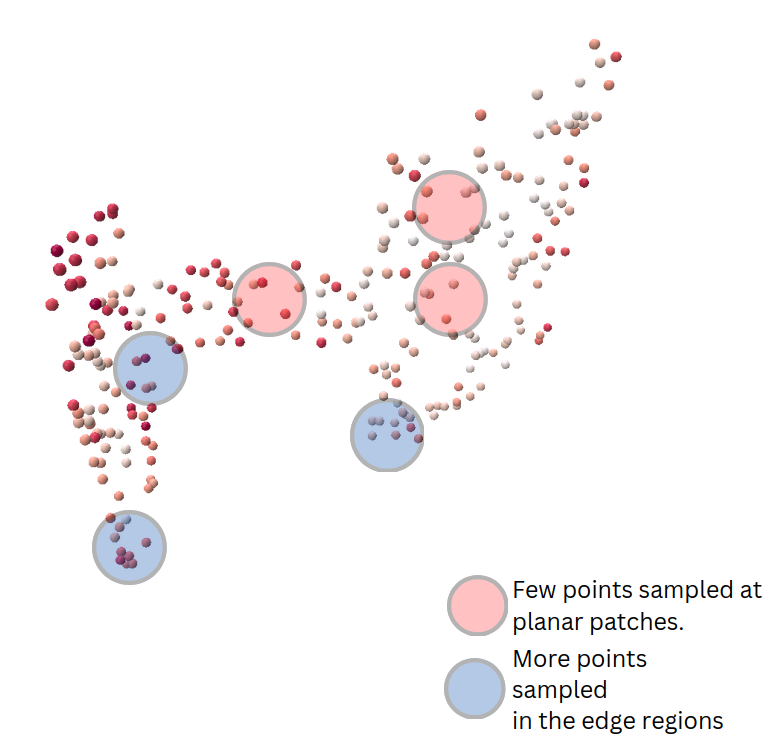
核心思路:论文的核心思路是将曲率信息融入到FPS采样过程中。通过学习一个策略,该策略能够判断哪些低曲率的点应该被高曲率的点替换。这样可以在减少点云数量的同时,尽可能保留重要的几何特征。
技术框架:整体框架包含以下几个主要模块:1) 初始FPS采样:使用标准FPS算法得到一个初始的采样点集。2) 曲率估计:使用深度神经网络估计每个点的曲率值。3) 强化学习排序:使用强化学习算法,结合FPS的软排序结果和曲率信息,对点进行重新排序。4) 点替换:根据排序结果,将FPS集合中一部分低曲率点替换为未选择集合中的高曲率点。
关键创新:论文的关键创新在于将强化学习和曲率信息相结合,用于指导点云的下采样过程。与现有的可微采样方法相比,该方法具有更强的训练稳定性,可以更容易地集成到端到端学习框架中。此外,通过强化学习,算法可以自适应地学习如何平衡FPS的全局均匀性和曲率信息的局部重要性。
关键设计:论文使用深度神经网络来估计点的曲率。强化学习部分,使用策略梯度方法训练一个策略网络,该网络输入点的FPS软排序值和曲率值,输出一个动作,表示是否应该替换该点。损失函数包括一个奖励函数,该奖励函数基于下游任务的性能来衡量采样结果的好坏。具体的网络结构和超参数设置在论文中有详细描述。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该算法在点云分类、分割和形状补全任务上均取得了state-of-the-art的结果。例如,在ModelNet40分类任务上,该算法的准确率相比于基线方法提升了显著的百分点。消融实验也验证了曲率信息和强化学习策略对性能提升的有效性。
🎯 应用场景
该研究成果可广泛应用于三维视觉、机器人、自动驾驶等领域。例如,在机器人抓取任务中,可以利用该算法对场景点云进行高效下采样,提取关键几何特征,从而提高抓取的准确性和效率。在自动驾驶中,可以用于减少激光雷达点云的数据量,降低计算负担,同时保留道路和障碍物的关键信息。
📄 摘要(原文)
Point cloud representation has gained traction due to its efficient memory usage and simplicity in acquisition, manipulation, and storage. However, as point cloud sizes increase, effective down-sampling becomes essential to address the computational requirements of downstream tasks. Classical approaches, such as furthest point sampling (FPS), perform well on benchmarks but rely on heuristics and overlook geometric features, like curvature, during down-sampling. In this paper, We introduce a reinforcement learning-based sampling algorithm that enhances FPS by integrating curvature information. Our approach ranks points by combining FPS-derived soft ranks with curvature scores computed by a deep neural network, allowing us to replace a proportion of low-curvature points in the FPS set with high-curvature points from the unselected set. Existing differentiable sampling techniques often suffer from training instability, hindering their integration into end-to-end learning frameworks. By contrast, our method achieves stable end-to-end learning, consistently outperforming baseline models across multiple downstream geometry processing tasks. We provide comprehensive ablation studies, with both qualitative and quantitative insights into the effect of each feature on performance. Our algorithm establishes state-of-the-art results for classification, segmentation and shape completion, showcasing its robustness and adaptability.