3D-Mem: 3D Scene Memory for Embodied Exploration and Reasoning
作者: Yuncong Yang, Han Yang, Jiachen Zhou, Peihao Chen, Hongxin Zhang, Yilun Du, Chuang Gan
分类: cs.CV, cs.RO
发布日期: 2024-11-23 (更新: 2025-04-04)
💡 一句话要点
提出3D-Mem,用于具身智能体在复杂环境中进行探索和推理,构建紧凑且信息丰富的3D场景记忆。
🎯 匹配领域: 支柱七:动作重定向 (Motion Retargeting) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 3D场景记忆 具身智能 主动探索 终身学习 机器人导航 环境感知
📋 核心要点
- 现有基于对象的三维场景图简化了空间关系,难以处理需要细致空间理解的查询,阻碍了具身智能体在复杂环境中的有效探索和推理。
- 3D-Mem通过记忆快照表示场景,捕捉视觉信息,并利用前沿快照辅助探索决策,同时设计增量构建流程和记忆检索技术实现终身记忆。
- 实验结果表明,3D-Mem显著提升了智能体在三维环境中的探索和推理能力,验证了其在具身智能领域应用的潜力。
📝 摘要(中文)
本文提出了一种名为3D-Mem的新型3D场景记忆框架,用于具身智能体。3D-Mem采用信息丰富的多视角图像(称为记忆快照)来表示场景,捕捉已探索区域的丰富视觉信息。此外,它通过引入前沿快照(未探索区域的概览)来整合基于前沿的探索,使智能体能够通过考虑已知和潜在的新信息来做出明智的决策。为了支持主动探索设置中的终身记忆,我们提出了3D-Mem的增量构建流程,以及用于记忆管理的记忆检索技术。在三个基准测试上的实验结果表明,3D-Mem显著增强了智能体在3D环境中进行探索和推理的能力,突显了其在推动具身人工智能应用方面的潜力。
🔬 方法详解
问题定义:现有方法,如基于对象的3D场景图,将场景建模为孤立的对象,并使用受限的文本关系描述它们,过度简化了空间关系。这使得智能体难以理解场景中物体间的细微空间关系,从而限制了其在复杂环境中进行有效探索和推理的能力。此外,现有方法缺乏主动探索和记忆管理的自然机制,难以应用于终身自主学习。
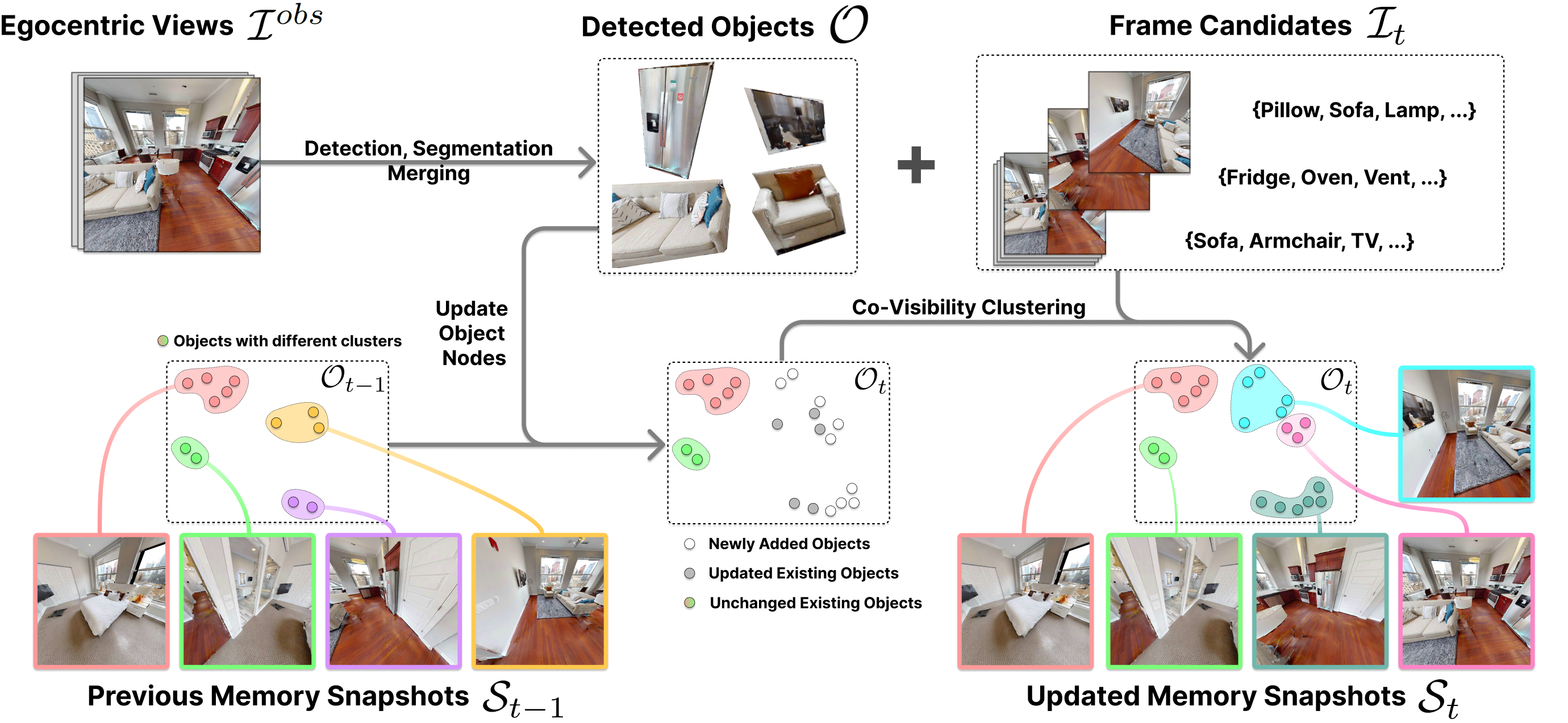
核心思路:3D-Mem的核心思路是使用多视角的图像快照(Memory Snapshots)来表示已探索的场景区域,捕捉丰富的视觉信息。同时,引入前沿快照(Frontier Snapshots)来表示未探索的区域,引导智能体进行更有效的探索。通过结合已探索和未探索区域的信息,智能体可以做出更明智的决策。
技术框架:3D-Mem的整体框架包含以下几个主要模块:1) 场景表示:使用Memory Snapshots和Frontier Snapshots来表示已探索和未探索的场景区域。2) 增量构建:设计了一种增量构建流程,可以逐步构建3D-Mem,支持终身学习。3) 记忆检索:提出了一种记忆检索技术,用于管理和检索存储在3D-Mem中的信息。4) 探索策略:利用Memory Snapshots和Frontier Snapshots的信息,制定有效的探索策略。
关键创新:3D-Mem的关键创新在于:1) 使用多视角的图像快照来表示场景,能够捕捉更丰富的视觉信息,避免了过度简化空间关系的问题。2) 引入前沿快照,使智能体能够同时考虑已探索和未探索区域的信息,从而做出更明智的探索决策。3) 提出了增量构建流程和记忆检索技术,支持终身学习和记忆管理。
关键设计:关于快照的选取策略(例如,选取哪些视角,选取多少张快照),以及如何有效地融合Memory Snapshots和Frontier Snapshots的信息,以指导智能体的探索决策,这些都是关键的设计细节。此外,记忆检索技术的具体实现方式,以及如何有效地管理和更新3D-Mem,也是重要的技术细节。论文中可能还涉及一些损失函数的设计,用于优化智能体的探索策略。
🖼️ 关键图片

📊 实验亮点
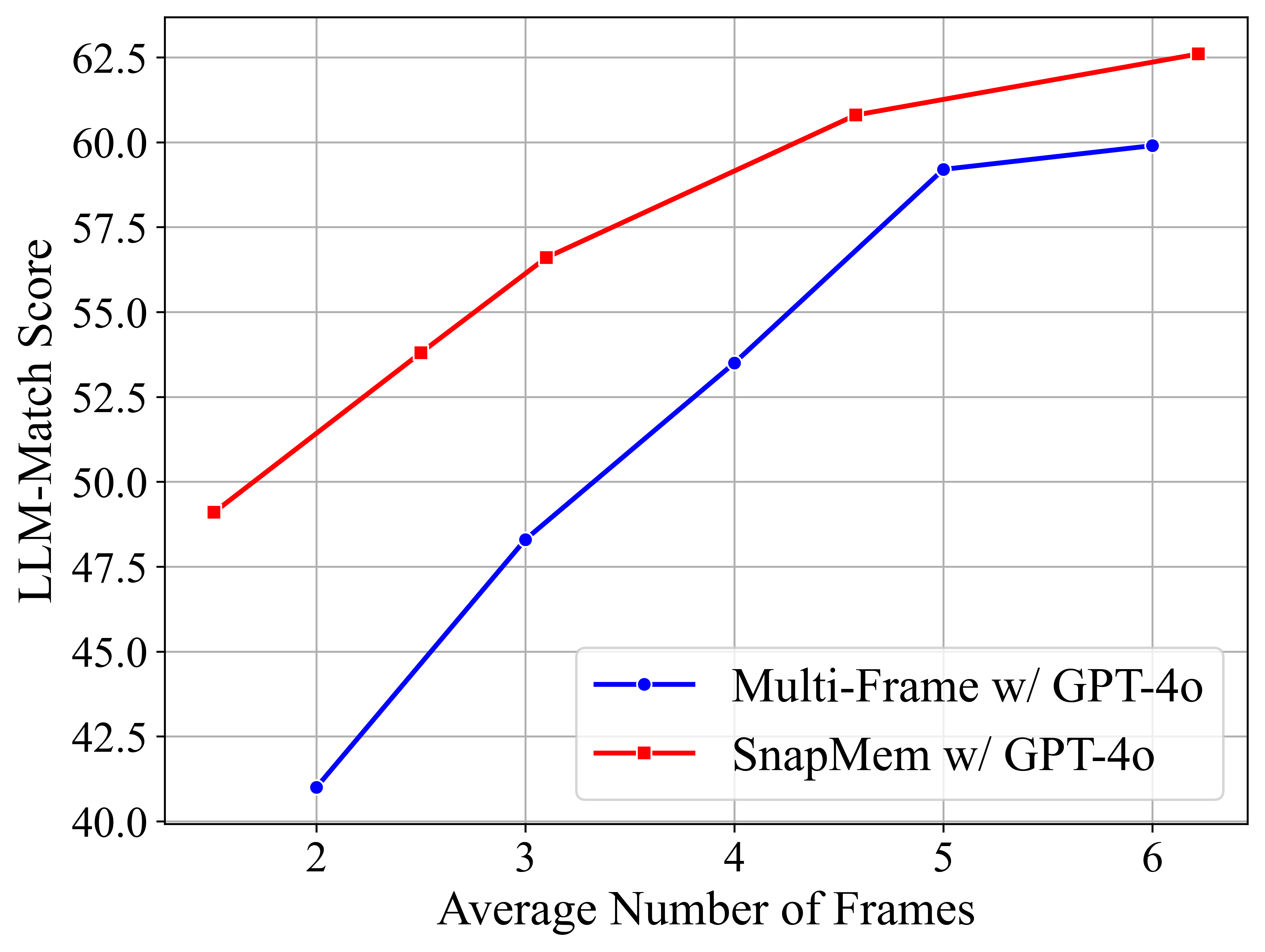
实验结果表明,在三个基准测试中,3D-Mem显著提升了智能体的探索和推理能力。具体的性能数据(例如,探索效率、推理准确率等)以及与现有基线的对比结果(例如,提升幅度)需要在论文中查找。总体而言,实验结果验证了3D-Mem的有效性和优越性。
🎯 应用场景
3D-Mem可应用于机器人导航、环境感知、智能家居、自动驾驶等领域。通过构建更紧凑和信息丰富的3D场景记忆,智能体能够更好地理解周围环境,从而实现更高效的探索、更准确的推理和更智能的决策。该研究有助于提升机器人在复杂环境中的自主性和适应性,具有重要的实际应用价值和广阔的未来发展前景。
📄 摘要(原文)
Constructing compact and informative 3D scene representations is essential for effective embodied exploration and reasoning, especially in complex environments over extended periods. Existing representations, such as object-centric 3D scene graphs, oversimplify spatial relationships by modeling scenes as isolated objects with restrictive textual relationships, making it difficult to address queries requiring nuanced spatial understanding. Moreover, these representations lack natural mechanisms for active exploration and memory management, hindering their application to lifelong autonomy. In this work, we propose 3D-Mem, a novel 3D scene memory framework for embodied agents. 3D-Mem employs informative multi-view images, termed Memory Snapshots, to represent the scene and capture rich visual information of explored regions. It further integrates frontier-based exploration by introducing Frontier Snapshots-glimpses of unexplored areas-enabling agents to make informed decisions by considering both known and potential new information. To support lifelong memory in active exploration settings, we present an incremental construction pipeline for 3D-Mem, as well as a memory retrieval technique for memory management. Experimental results on three benchmarks demonstrate that 3D-Mem significantly enhances agents' exploration and reasoning capabilities in 3D environments, highlighting its potential for advancing applications in embodied AI.