Mini-Splatting2: Building 360 Scenes within Minutes via Aggressive Gaussian Densification
作者: Guangchi Fang, Bing Wang
分类: cs.CV
发布日期: 2024-11-19
💡 一句话要点
Mini-Splatting2:通过激进高斯致密化,在数分钟内构建360度场景。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 高斯溅射 场景重建 快速优化 高斯致密化 可见性剔除
📋 核心要点
- 现有高斯溅射方法在快速场景优化方面存在挑战,尤其是在早期阶段难以有效重建密集点云。
- 提出激进高斯致密化方法,通过在优化早期增加关键高斯数量,增强模型捕获密集场景几何的能力。
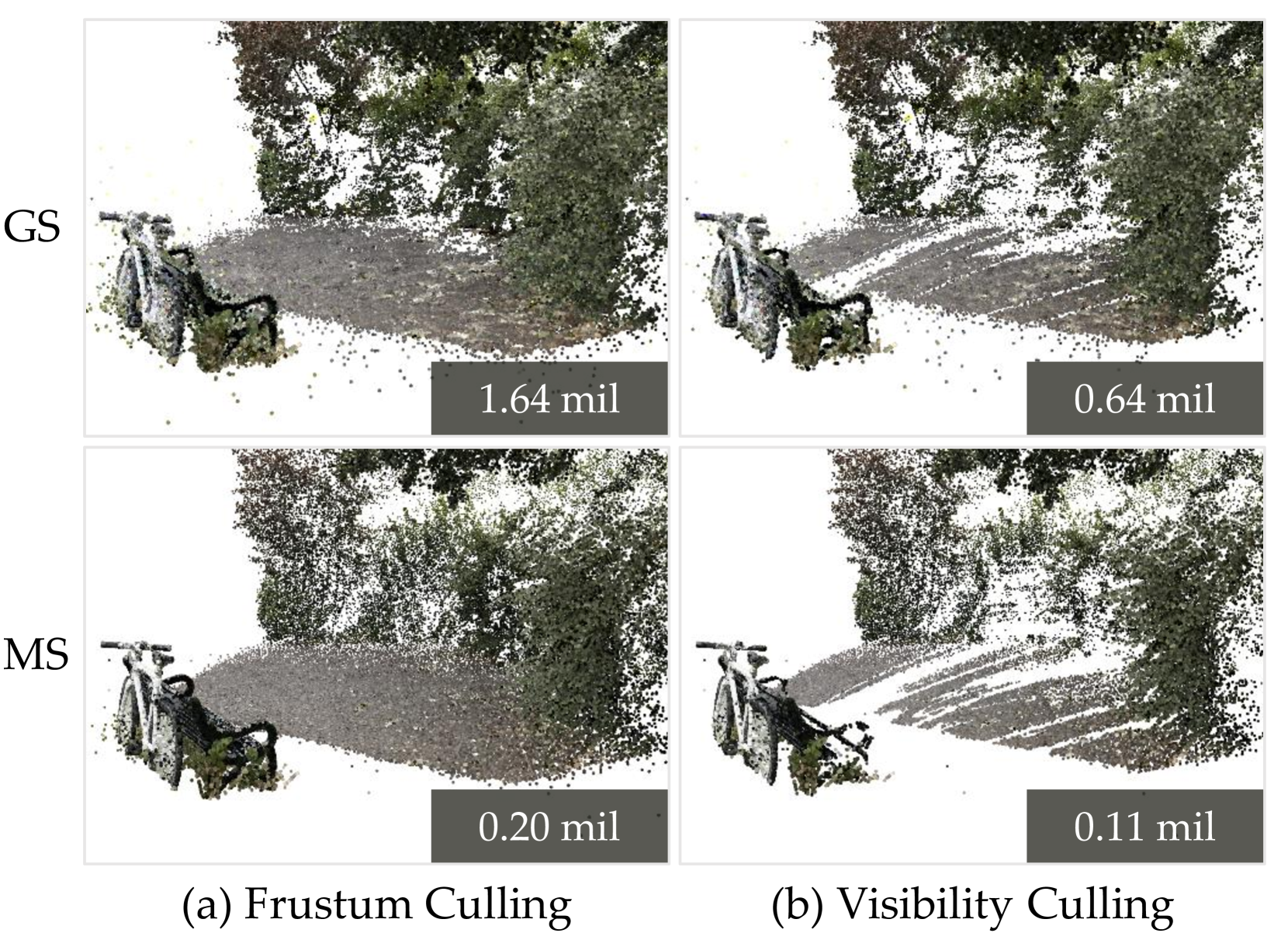
- 引入可见性剔除,利用每个视点的高斯重要性加速优化过程,在优化时间、高斯数量和渲染质量之间取得平衡。
📝 摘要(中文)
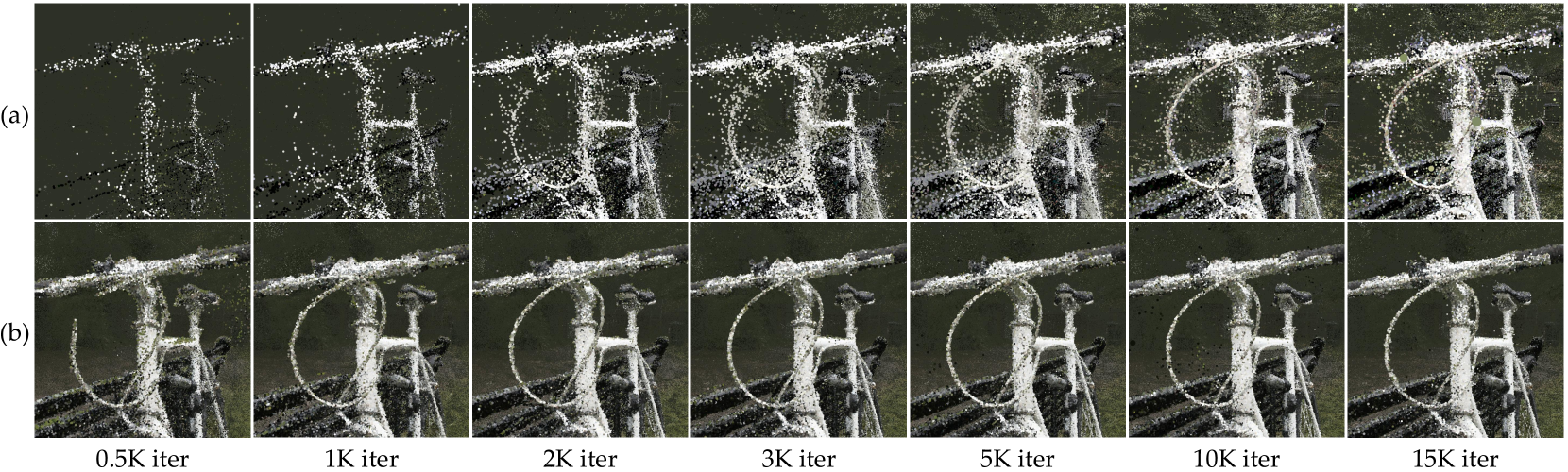
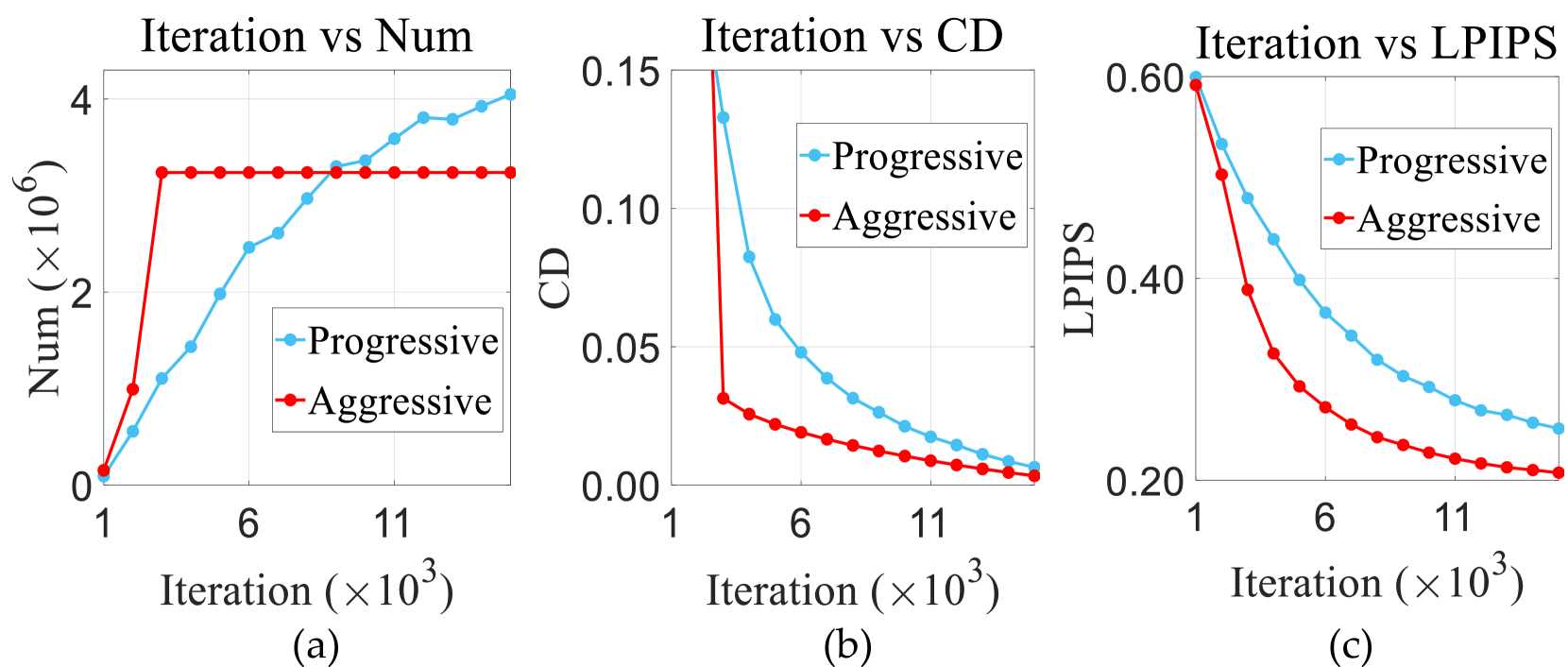
本研究探索了高斯溅射快速场景优化的关键挑战。通过对几何建模过程的深入分析,我们发现通过高斯表示可以在优化早期有效地重建密集点云。这一洞察力促使我们提出了激进高斯致密化方法,为传统的渐进式致密化方法提供了一种更有效的替代方案。通过显著增加关键高斯的数量,我们增强了模型在优化早期捕获密集场景几何的能力。该策略无缝集成到Mini-Splatting的致密化和简化框架中,从而在不影响质量的前提下实现快速收敛。此外,我们在高斯溅射中引入了可见性剔除,利用每个视点的高斯重要性作为预计算的可见性来加速优化过程。我们的Mini-Splatting2在优化时间、高斯数量和渲染质量之间实现了平衡的权衡,为未来基于高斯溅射的工作奠定了坚实的基础。我们的工作为现实世界应用中更高效、高质量的3D场景建模奠定了基础,无论是否被接收,代码都将公开。
🔬 方法详解
问题定义:现有基于高斯溅射的场景重建方法,在优化速度上存在瓶颈,尤其是在优化初期,难以快速有效地重建出高质量的密集点云。传统的渐进式致密化方法效率较低,限制了实时或近实时场景重建的应用。
核心思路:论文的核心思路是通过“激进高斯致密化”策略,在优化初期就大幅增加高斯基元的数量,从而快速提升模型对场景几何的表达能力。这种方式能够更快地捕捉到场景的细节,避免了传统方法中缓慢的几何体增长过程。
技术框架:Mini-Splatting2建立在Mini-Splatting框架之上,主要包含以下几个阶段:1) 初始化:使用输入图像初始化高斯基元。2) 激进致密化:在优化初期,通过分裂和克隆等操作,快速增加高斯基元的数量。3) 优化:使用可微分渲染损失函数优化高斯基元的参数(位置、旋转、缩放、颜色等)。4) 可见性剔除:根据预计算的每个视点的高斯重要性,剔除对渲染贡献较小的高斯基元,加速优化。5) 简化:在优化后期,通过合并冗余的高斯基元,减少模型大小。
关键创新:该方法最重要的创新点在于“激进高斯致密化”策略。与传统的渐进式致密化方法不同,Mini-Splatting2在优化初期就主动增加高斯基元的数量,从而更快地捕捉到场景的几何细节。此外,引入的可见性剔除方法也进一步加速了优化过程。
关键设计:在激进致密化阶段,论文可能使用了特定的分裂和克隆策略,例如基于梯度或渲染误差来选择需要分裂的高斯基元。损失函数可能包括渲染一致性损失、深度一致性损失等。可见性剔除可能基于预先计算的每个视点的高斯重要性,并设置一个阈值来决定是否剔除某个高斯基元。具体的参数设置(如分裂阈值、克隆比例、剔除阈值等)对最终的性能有重要影响,但具体数值未知。
🖼️ 关键图片
📊 实验亮点
Mini-Splatting2通过激进高斯致密化和可见性剔除,在优化时间、高斯数量和渲染质量之间取得了良好的平衡。相较于传统方法,该方法能够在更短的时间内重建出更高质量的3D场景模型,并减少高斯基元的数量,从而降低存储和渲染成本。具体的性能数据和对比基线未知。
🎯 应用场景
该研究成果可应用于快速3D场景重建、虚拟现实/增强现实、机器人导航、自动驾驶等领域。通过快速构建高质量的3D场景模型,可以提升用户体验,降低计算成本,并为相关应用提供更可靠的环境感知能力。未来,该技术有望进一步扩展到动态场景的建模和编辑。
📄 摘要(原文)
In this study, we explore the essential challenge of fast scene optimization for Gaussian Splatting. Through a thorough analysis of the geometry modeling process, we reveal that dense point clouds can be effectively reconstructed early in optimization through Gaussian representations. This insight leads to our approach of aggressive Gaussian densification, which provides a more efficient alternative to conventional progressive densification methods. By significantly increasing the number of critical Gaussians, we enhance the model capacity to capture dense scene geometry at the early stage of optimization. This strategy is seamlessly integrated into the Mini-Splatting densification and simplification framework, enabling rapid convergence without compromising quality. Additionally, we introduce visibility culling within Gaussian Splatting, leveraging per-view Gaussian importance as precomputed visibility to accelerate the optimization process. Our Mini-Splatting2 achieves a balanced trade-off among optimization time, the number of Gaussians, and rendering quality, establishing a strong baseline for future Gaussian-Splatting-based works. Our work sets the stage for more efficient, high-quality 3D scene modeling in real-world applications, and the code will be made available no matter acceptance.