Generative World Explorer
作者: Taiming Lu, Tianmin Shu, Alan Yuille, Daniel Khashabi, Jieneng Chen
分类: cs.CV, cs.RO
发布日期: 2024-11-18 (更新: 2025-09-08)
备注: Website: generative-world-explorer.github.io
💡 一句话要点
提出Generative World Explorer,用于具身智能体在3D城市场景中的心理探索与决策。
🎯 匹配领域: 支柱六:视频提取与匹配 (Video Extraction) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 具身智能 心理探索 生成模型 认知更新 决策规划
📋 核心要点
- 具身智能体在部分观测下的规划面临挑战,现有方法依赖物理探索更新环境认知。
- Genex通过心理探索生成想象观测,更新智能体认知,辅助决策,减少物理探索需求。
- 实验证明Genex能生成高质量观测,提升决策模型性能,并在Genex-DB数据集上验证有效性。
📝 摘要(中文)
本文提出了一种名为Generative World Explorer (Genex) 的具身智能体探索框架,旨在使智能体能够像人类一样,通过心理探索来“想象”未见区域,并利用想象的观测结果来更新其对世界的认知。这种更新后的认知有助于智能体在当前步骤做出更明智的决策,而无需时刻进行物理探索。为了训练Genex,作者创建了一个合成的城市场景数据集Genex-DB。实验结果表明,Genex能够在大型虚拟物理世界的长时程探索中生成高质量且一致的观测结果,并且利用生成的观测结果更新的认知可以帮助现有的决策模型(例如,LLM智能体)做出更好的规划。
🔬 方法详解
问题定义:现有具身智能体在部分观测环境下进行规划时,主要依赖于物理探索来更新对环境的认知。这种方法效率较低,尤其是在大型复杂环境中。痛点在于智能体无法像人类一样,利用想象力来探索未知的环境,从而做出更明智的决策。
核心思路:Genex的核心思路是让智能体具备“心理探索”的能力,即通过生成模型来模拟未见区域的观测结果,并利用这些想象的观测来更新智能体对世界的认知。这样,智能体就可以在不进行实际物理探索的情况下,对环境有更全面的了解,从而做出更好的决策。这种设计模仿了人类的认知过程,提高了探索效率和决策质量。
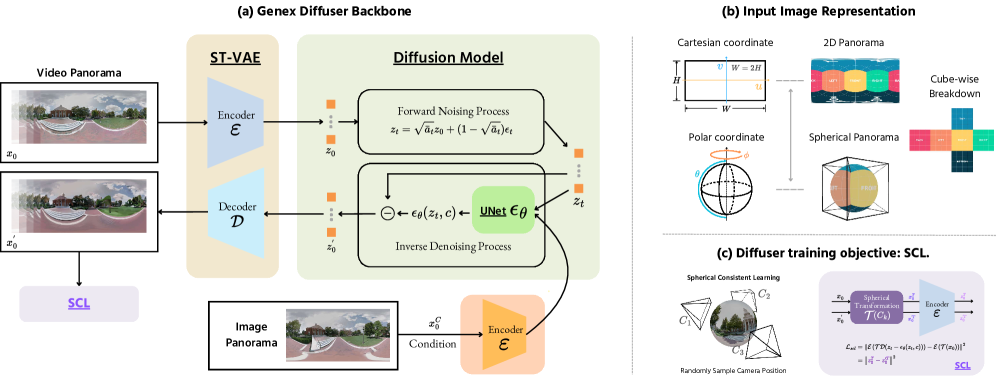
技术框架:Genex框架主要包含以下几个模块:1) 环境感知模块:用于获取当前智能体的观测信息。2) 生成模型:用于根据当前观测和智能体的认知状态,生成未见区域的想象观测。3) 认知更新模块:用于将想象观测融入到智能体的认知中,更新其对世界的理解。4) 决策模块:用于根据更新后的认知,制定下一步的行动计划。整个流程是循环迭代的,智能体不断生成想象观测、更新认知、做出决策,直到完成目标。
关键创新:Genex的关键创新在于将生成模型引入到具身智能体的探索过程中,使其具备了心理探索的能力。与传统的基于物理探索的方法相比,Genex能够更高效地探索环境,并做出更明智的决策。此外,Genex还能够利用生成模型来填补观测中的缺失信息,提高智能体对环境的鲁棒性。
关键设计:Genex的具体实现细节未知,摘要中没有提及生成模型的具体类型、损失函数或网络结构。但是,可以推测生成模型需要能够生成高质量、一致性的观测结果,并且能够与智能体的认知状态进行有效的交互。此外,认知更新模块的设计也至关重要,需要能够有效地将想象观测融入到智能体的认知中,避免出现认知偏差或错误。
🖼️ 关键图片


📊 实验亮点
实验结果表明,Genex能够在大型虚拟物理世界的长时程探索中生成高质量且一致的观测结果。更重要的是,利用Genex生成的观测结果更新的认知,能够显著提升现有决策模型(例如,LLM智能体)的规划能力。具体的性能数据和提升幅度未知,需要在论文中进一步查找。
🎯 应用场景
Genex具有广泛的应用前景,例如,可以应用于机器人导航、自动驾驶、虚拟现实等领域。在机器人导航中,Genex可以帮助机器人在未知环境中进行高效探索,并规划出最优路径。在自动驾驶中,Genex可以帮助车辆预测周围环境的变化,提高驾驶安全性。在虚拟现实中,Genex可以帮助用户探索虚拟世界,并与之进行交互。未来,Genex有望成为具身智能体领域的重要技术。
📄 摘要(原文)
Planning with partial observation is a central challenge in embodied AI. A majority of prior works have tackled this challenge by developing agents that physically explore their environment to update their beliefs about the world state. In contrast, humans can $\textit{imagine}$ unseen parts of the world through a mental exploration and $\textit{revise}$ their beliefs with imagined observations. Such updated beliefs can allow them to make more informed decisions, without necessitating the physical exploration of the world at all times. To achieve this human-like ability, we introduce the $\textit{Generative World Explorer (Genex)}$, an egocentric world exploration framework that allows an agent to mentally explore a large-scale 3D world (e.g., urban scenes) and acquire imagined observations to update its belief. This updated belief will then help the agent to make a more informed decision at the current step. To train $\textit{Genex}$, we create a synthetic urban scene dataset, Genex-DB. Our experimental results demonstrate that (1) $\textit{Genex}$ can generate high-quality and consistent observations during long-horizon exploration of a large virtual physical world and (2) the beliefs updated with the generated observations can inform an existing decision-making model (e.g., an LLM agent) to make better plans.