GVKF: Gaussian Voxel Kernel Functions for Highly Efficient Surface Reconstruction in Open Scenes
作者: Gaochao Song, Chong Cheng, Hao Wang
分类: cs.CV
发布日期: 2024-11-04 (更新: 2024-12-04)
备注: NeurIPS 2024
💡 一句话要点
提出高斯体素核函数,高效重建开放场景三维表面
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 三维重建 高斯溅射 神经辐射场 核函数 体素表示 开放场景 实时渲染
📋 核心要点
- 基于NeRF的重建方法计算量大,而3DGS方法在稀疏区域表面细节不足且内存消耗高。
- 提出高斯体素核函数(GVKF),通过核回归将离散3DGS转换为连续场景表示。
- 实验表明,GVKF在重建质量、渲染速度和内存消耗方面均优于现有方法。
📝 摘要(中文)
本文提出了一种在开放场景中高效且有效地进行三维表面重建的新方法。现有的基于神经辐射场(NeRF)的方法由于采用隐式表示,通常需要大量的训练和渲染时间。相比之下,3D高斯溅射(3DGS)使用显式和离散的表示,因此重建的表面由大量的高斯基元构建,这导致过度的内存消耗和稀疏高斯区域中粗糙的表面细节。为了解决这些问题,我们提出了高斯体素核函数(GVKF),它通过核回归建立基于离散3DGS的连续场景表示。GVKF集成了快速3DGS光栅化和高效的场景隐式表示,实现了高保真度的开放场景表面重建。在具有挑战性的场景数据集上的实验证明了我们提出的GVKF的效率和有效性,具有高重建质量、实时渲染速度以及在存储和训练内存消耗方面的显著节省。
🔬 方法详解
问题定义:现有基于NeRF的方法训练和渲染耗时,而3DGS方法虽然速度快,但由于使用大量高斯基元,导致内存消耗过大,且在稀疏区域表面细节粗糙。因此,需要一种既能保持实时渲染速度,又能有效降低内存消耗,并提升表面重建质量的方法。
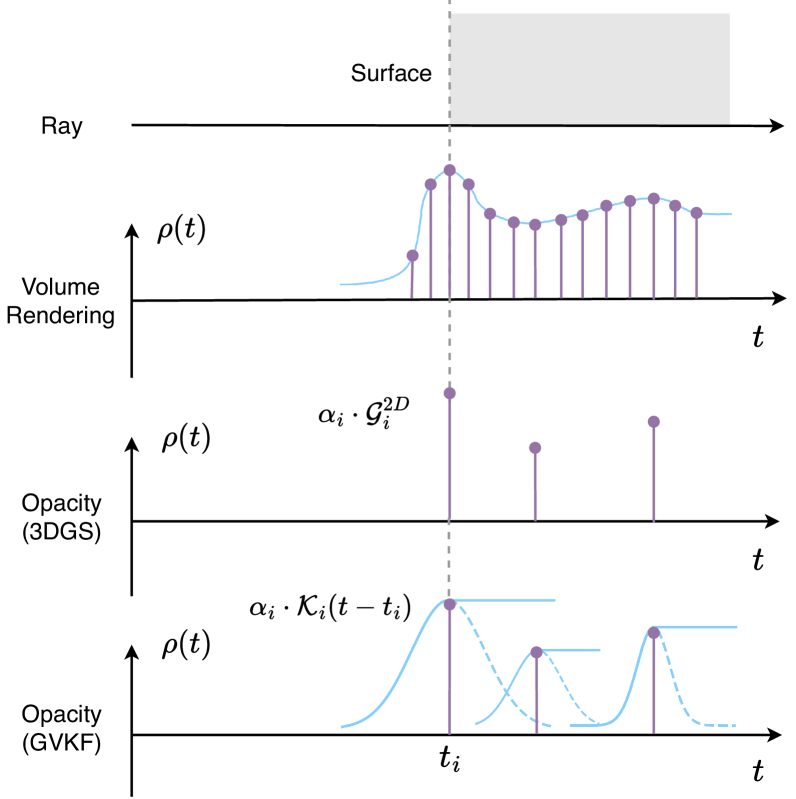
核心思路:论文的核心思路是将离散的3DGS表示通过核回归转换为连续的场景表示。具体来说,就是利用高斯体素核函数(GVKF)对3DGS中的高斯基元进行加权平均,从而在体素网格上构建一个连续的密度场。这样既能保留3DGS的快速渲染特性,又能通过核函数平滑表面,提升重建质量。
技术框架:GVKF方法主要包含以下几个阶段:1) 使用3DGS初始化场景表示;2) 将3DGS中的高斯基元投影到体素网格上,并计算每个体素的密度值,该密度值由高斯体素核函数加权得到;3) 使用核回归方法,基于体素密度场重建连续的表面;4) 使用光线投射算法渲染重建的表面。
关键创新:该方法最重要的创新点在于提出了高斯体素核函数(GVKF),它将离散的3DGS表示转换为连续的场景表示,从而在保证渲染速度的同时,提升了表面重建的质量,并显著降低了内存消耗。与直接使用3DGS相比,GVKF能够更好地处理稀疏区域,避免表面细节的丢失。
关键设计:GVKF的关键设计包括:1) 高斯核函数的选择,论文可能采用了标准高斯核或其他变体,以控制平滑程度;2) 体素网格的分辨率,需要根据场景的复杂度和内存限制进行调整;3) 核回归的参数设置,例如带宽参数,它决定了核函数的影响范围;4) 损失函数的设计,可能包括重建损失、正则化项等,用于优化GVKF的参数。
🖼️ 关键图片


📊 实验亮点
实验结果表明,GVKF方法在重建质量、渲染速度和内存消耗方面均优于现有的NeRF和3DGS方法。具体来说,GVKF在保持实时渲染速度的同时,显著降低了内存消耗,并提升了表面重建的精度。论文在具有挑战性的数据集上进行了验证,证明了GVKF的有效性和鲁棒性。具体性能数据未知,但摘要强调了显著的节省。
🎯 应用场景
该研究成果可应用于自动驾驶、机器人导航、虚拟现实/增强现实等领域。例如,在自动驾驶中,可以利用该方法快速准确地重建周围环境的三维模型,从而提高车辆的感知能力和安全性。在VR/AR中,可以用于创建更加逼真和流畅的虚拟场景,提升用户体验。
📄 摘要(原文)
In this paper we present a novel method for efficient and effective 3D surface reconstruction in open scenes. Existing Neural Radiance Fields (NeRF) based works typically require extensive training and rendering time due to the adopted implicit representations. In contrast, 3D Gaussian splatting (3DGS) uses an explicit and discrete representation, hence the reconstructed surface is built by the huge number of Gaussian primitives, which leads to excessive memory consumption and rough surface details in sparse Gaussian areas. To address these issues, we propose Gaussian Voxel Kernel Functions (GVKF), which establish a continuous scene representation based on discrete 3DGS through kernel regression. The GVKF integrates fast 3DGS rasterization and highly effective scene implicit representations, achieving high-fidelity open scene surface reconstruction. Experiments on challenging scene datasets demonstrate the efficiency and effectiveness of our proposed GVKF, featuring with high reconstruction quality, real-time rendering speed, significant savings in storage and training memory consumption.