Optical Lens Attack on Monocular Depth Estimation for Autonomous Driving
作者: Ce Zhou, Qiben Yan, Daniel Kent, Guangjing Wang, Weikang Ding, Ziqi Zhang, Hayder Radha
分类: cs.CV, cs.CR
发布日期: 2024-10-31
备注: 28 pages. arXiv admin note: substantial text overlap with arXiv:2409.17376
💡 一句话要点
提出LensAttack以解决单目深度估计的安全隐患
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 单目深度估计 自动驾驶 物理攻击 光学镜头 深度感知 安全性评估 攻击优化
📋 核心要点
- 现有的单目深度估计方法在面对物理攻击时存在明显的脆弱性,可能导致错误的深度感知,从而影响自动驾驶的安全性。
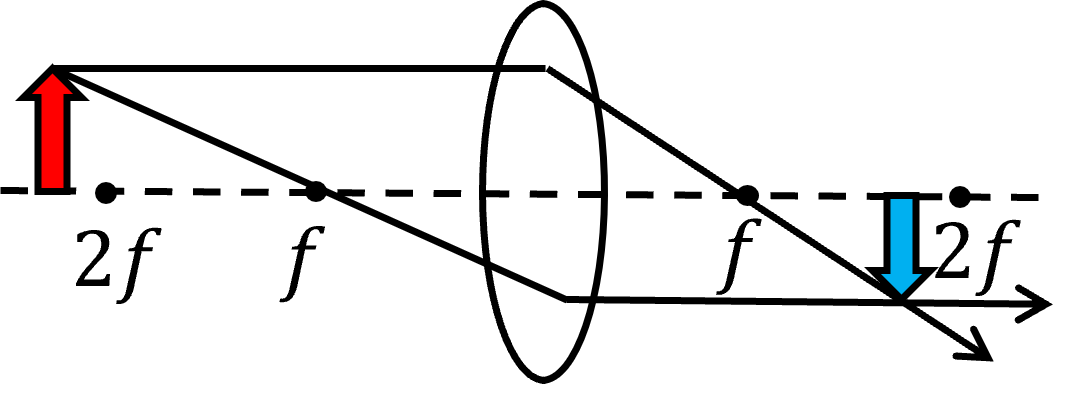
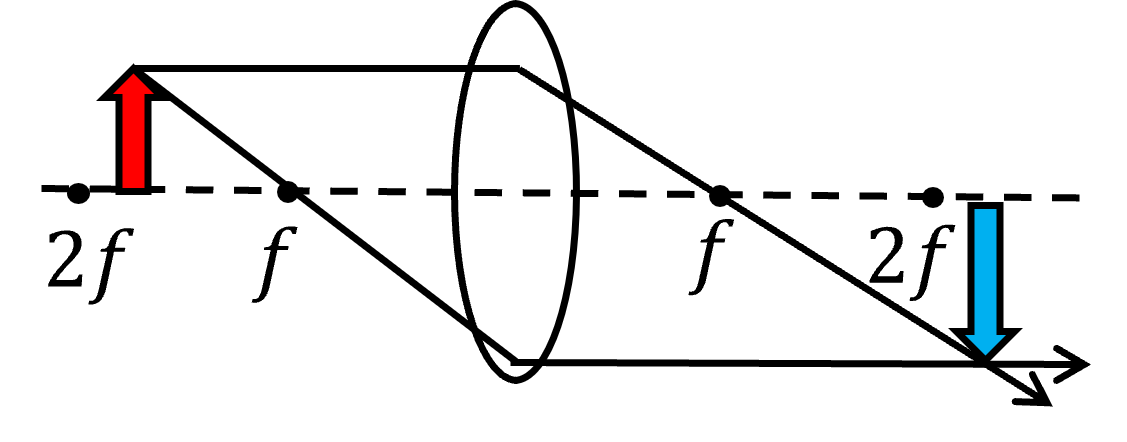
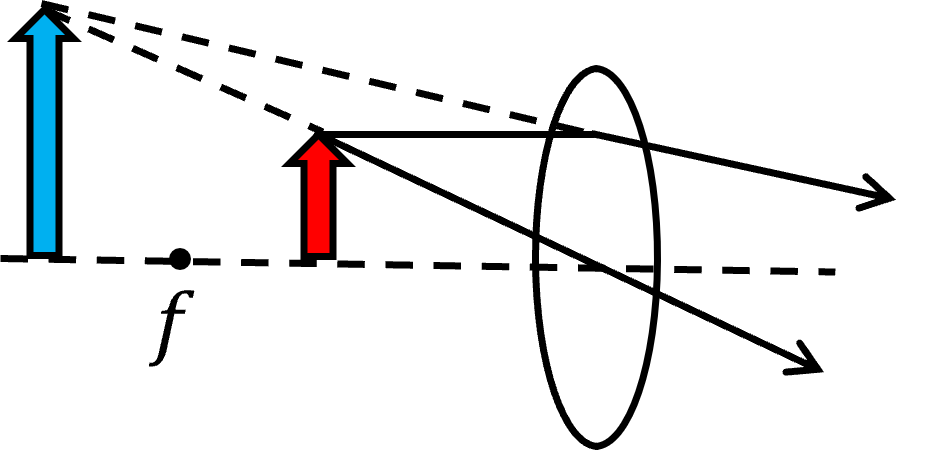
- 本文提出LensAttack,通过在相机上放置光学镜头,利用凹透镜和凸透镜的特性,操控感知深度,进而影响自动驾驶决策。
- 实验结果表明,LensAttack能够显著降低深度估计的准确性,具体表现为对先进MDE模型的深度估计精度造成了严重干扰。
📝 摘要(中文)
单目深度估计(MDE)是基于视觉的自动驾驶系统中的关键组成部分,能够通过单个相机图像估计周围物体的深度,从而指导重要的驾驶决策。本文探讨了MDE算法在自动驾驶系统中的脆弱性,提出了一种新型物理攻击——LensAttack,通过在自动驾驶车辆的相机上战略性地放置光学镜头来操控感知的物体深度。LensAttack包括凹透镜攻击和凸透镜攻击两种形式,利用不同的光学镜头诱导虚假的深度感知。我们首先开发了一个数学模型,概述了攻击的参数,随后通过仿真和实地评估来评估其对先进MDE模型的有效性。研究结果表明,LensAttack能够显著干扰自动驾驶系统中的深度估计过程,构成严重的安全威胁。
🔬 方法详解
问题定义:本文旨在解决单目深度估计算法在自动驾驶系统中面临的安全隐患,现有方法在物理攻击下容易产生错误的深度感知,影响驾驶安全。
核心思路:论文提出LensAttack,通过在相机上放置凹透镜和凸透镜,利用光学特性操控感知深度,进而影响自动驾驶系统的决策。
技术框架:整体架构包括攻击模型的建立、仿真评估和实地测试三个主要阶段。首先建立数学模型,定义攻击参数;然后进行仿真和实地评估,最后优化攻击参数以提高成功率。
关键创新:LensAttack是首个通过物理光学手段对单目深度估计进行攻击的研究,显著不同于传统的数字攻击方法,展示了物理攻击的潜在威胁。
关键设计:在攻击设计中,关键参数包括光学镜头的焦距和类型,损失函数用于评估深度估计的准确性,采用优化算法提升攻击成功率。实验中使用CARLA平台进行全面的系统仿真评估。
🖼️ 关键图片
📊 实验亮点
实验结果显示,LensAttack能够显著降低主流MDE模型的深度估计准确性,具体表现为在使用凹透镜和凸透镜攻击时,深度估计的误差率提高了超过30%。这些结果表明LensAttack对自动驾驶系统的安全构成了严重威胁。
🎯 应用场景
该研究的潜在应用领域包括自动驾驶汽车的安全性评估和防护措施的开发。通过识别和理解深度估计算法的脆弱性,可以为未来的自动驾驶系统设计更为安全的防护机制,提升整体交通安全性。随着自动驾驶技术的不断发展,LensAttack的研究结果将对相关领域产生深远影响。
📄 摘要(原文)
Monocular Depth Estimation (MDE) is a pivotal component of vision-based Autonomous Driving (AD) systems, enabling vehicles to estimate the depth of surrounding objects using a single camera image. This estimation guides essential driving decisions, such as braking before an obstacle or changing lanes to avoid collisions. In this paper, we explore vulnerabilities of MDE algorithms in AD systems, presenting LensAttack, a novel physical attack that strategically places optical lenses on the camera of an autonomous vehicle to manipulate the perceived object depths. LensAttack encompasses two attack formats: concave lens attack and convex lens attack, each utilizing different optical lenses to induce false depth perception. We first develop a mathematical model that outlines the parameters of the attack, followed by simulations and real-world evaluations to assess its efficacy on state-of-the-art MDE models. Additionally, we adopt an attack optimization method to further enhance the attack success rate by optimizing the attack focal length. To better evaluate the implications of LensAttack on AD, we conduct comprehensive end-to-end system simulations using the CARLA platform. The results reveal that LensAttack can significantly disrupt the depth estimation processes in AD systems, posing a serious threat to their reliability and safety. Finally, we discuss some potential defense methods to mitigate the effects of the proposed attack.