FAST GDRNPP: Improving the Speed of State-of-the-Art 6D Object Pose Estimation
作者: Thomas Pöllabauer, Ashwin Pramod, Volker Knauthe, Michael Wahl
分类: cs.CV, cs.AI
发布日期: 2024-09-18
💡 一句话要点
提出FAST GDRNPP,加速6D物体姿态估计,兼顾精度与速度。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 6D物体姿态估计 模型压缩 剪枝 知识蒸馏 深度学习 工业应用 实时性
📋 核心要点
- 现有6D物体姿态估计方法难以在精度和速度之间取得平衡,限制了其在工业场景中的应用。
- FAST GDRNPP通过模型压缩、剪枝和知识蒸馏等技术,在不显著降低精度的前提下,提升推理速度。
- 实验表明,该方法在保持与现有技术相当的精度的同时,显著提高了推理速度,更适用于实际应用。
📝 摘要(中文)
6D物体姿态估计旨在确定场景中物体相对于选定坐标系的三维平移和旋转。该问题对于工业任务(如质量控制、无序分拣和机器人操作)中的许多实际应用至关重要,在这些应用中,速度和精度对于实际部署都至关重要。当前的经典模型和基于深度学习的模型通常难以兼顾精度和延迟。本研究专注于提高一种先进的深度学习模型GDRNPP的速度,同时保持其高精度。我们采用多种技术来减小模型尺寸并缩短推理时间,包括使用更小更快的骨干网络、剪枝不必要的参数以及使用知识蒸馏将知识从大型高性能模型迁移到更小更高效的学生模型。研究结果表明,所提出的配置在保持与最先进技术相当的精度的同时,显著缩短了推理时间。这一进步可以提高各种工业场景中的效率和实用性,从而增强6D物体姿态估计模型在实际环境中的整体适用性。
🔬 方法详解
问题定义:论文旨在解决6D物体姿态估计中速度慢的问题。现有方法,包括GDRNPP,虽然精度高,但推理时间较长,难以满足工业场景对实时性的要求。因此,需要在保证精度的前提下,显著提升模型的推理速度。
核心思路:论文的核心思路是在保持GDRNPP高精度的基础上,通过模型压缩、剪枝和知识蒸馏等技术,构建一个更小、更快的模型。通过减小模型尺寸和降低计算复杂度,从而提升推理速度。
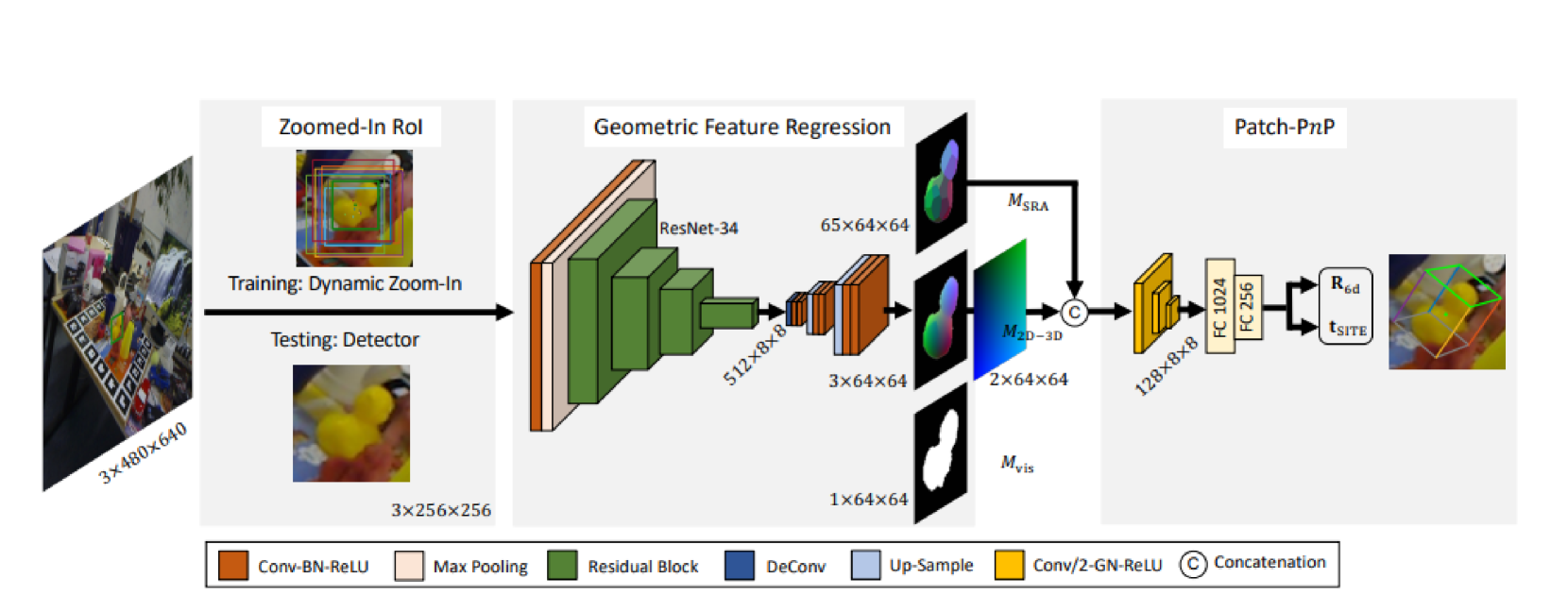
技术框架:FAST GDRNPP的技术框架主要包括以下几个阶段:1) 选择更小更快的骨干网络,替换原有的骨干网络,降低计算量;2) 对模型进行剪枝,移除不重要的参数,进一步减小模型尺寸;3) 使用知识蒸馏技术,将大型教师模型的知识迁移到小型学生模型,保证学生模型的精度。
关键创新:论文的关键创新在于将模型压缩、剪枝和知识蒸馏等技术有效地结合起来,应用于GDRNPP模型,在保证精度的前提下,显著提升了推理速度。这种方法不同于以往单纯追求精度提升的研究,更加注重模型的实用性。
关键设计:论文的关键设计包括:1) 选择合适的骨干网络,需要在速度和精度之间进行权衡;2) 设计有效的剪枝策略,避免过度剪枝导致精度下降;3) 设计合理的知识蒸馏损失函数,保证学生模型能够有效地学习教师模型的知识。具体的参数设置和网络结构细节在论文中进行了详细描述(未知)。
🖼️ 关键图片

📊 实验亮点
论文通过实验验证了FAST GDRNPP的有效性。实验结果表明,在保持与GDRNPP相当的精度的前提下,FAST GDRNPP的推理速度得到了显著提升。具体的性能数据和对比基线在论文中进行了详细描述(未知),但总体而言,该方法在速度方面取得了显著的进步,使其更适用于实际应用。
🎯 应用场景
FAST GDRNPP在工业领域具有广泛的应用前景,例如质量控制、无序分拣和机器人操作等。更快的推理速度使得机器人能够更迅速地识别和抓取物体,提高生产效率。此外,该方法还可以应用于增强现实和虚拟现实等领域,提供更流畅的用户体验。该研究的成果有助于推动6D物体姿态估计技术在实际场景中的应用。
📄 摘要(原文)
6D object pose estimation involves determining the three-dimensional translation and rotation of an object within a scene and relative to a chosen coordinate system. This problem is of particular interest for many practical applications in industrial tasks such as quality control, bin picking, and robotic manipulation, where both speed and accuracy are critical for real-world deployment. Current models, both classical and deep-learning-based, often struggle with the trade-off between accuracy and latency. Our research focuses on enhancing the speed of a prominent state-of-the-art deep learning model, GDRNPP, while keeping its high accuracy. We employ several techniques to reduce the model size and improve inference time. These techniques include using smaller and quicker backbones, pruning unnecessary parameters, and distillation to transfer knowledge from a large, high-performing model to a smaller, more efficient student model. Our findings demonstrate that the proposed configuration maintains accuracy comparable to the state-of-the-art while significantly improving inference time. This advancement could lead to more efficient and practical applications in various industrial scenarios, thereby enhancing the overall applicability of 6D Object Pose Estimation models in real-world settings.