Gaussian Splatting Lucas-Kanade
作者: Liuyue Xie, Joel Julin, Koichiro Niinuma, Laszlo A. Jeni
分类: cs.CV, cs.GR
发布日期: 2024-07-16 (更新: 2025-03-27)
备注: International Conference on Learning Representations
💡 一句话要点
提出高斯溅射Lucas-Kanade方法,解决动态场景和弱相机运动下的三维重建问题。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 高斯溅射 动态场景重建 Lucas-Kanade 光流估计 三维重建
📋 核心要点
- 现有动态高斯溅射方法在相机运动不足或场景动态性强时表现不佳,依赖数据先验导致泛化性受限。
- 论文将经典的Lucas-Kanade方法与动态高斯溅射结合,利用前向扭曲场网络的特性,推导解析速度场。
- 实验证明,该方法在相机运动小、场景动态性强的场景下,能有效重建3D场景,优于现有方法。
📝 摘要(中文)
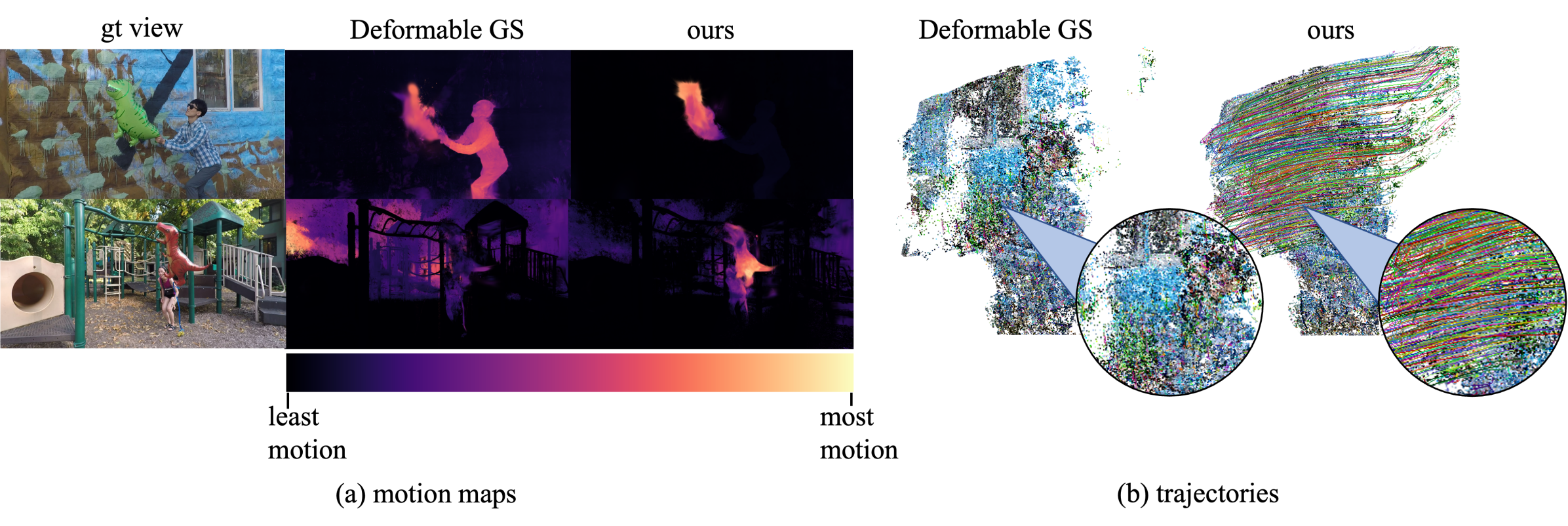
高斯溅射及其动态扩展在通过2D图像重建3D场景时非常有效,前提是存在显著的相机运动以促进运动视差,并且场景对象保持相对静态。然而,在许多实际场景中,这些条件并不满足。因此,数据驱动的语义和几何先验被优先用作正则化项,尽管它们偏向于训练数据并且忽略了更广泛的运动动态。本文提出了一种新颖的分析方法,将经典的Lucas-Kanade方法应用于动态高斯溅射。通过利用前向扭曲场网络的内在属性,我们推导出一个解析速度场,通过时间积分,可以促进精确的场景流计算。这使得能够精确地对扭曲场施加运动约束,从而约束高斯体的2D运动和3D位置。实验表明,我们的方法擅长重建具有最小相机运动的高度动态场景,并在合成和真实场景中都得到了验证。
🔬 方法详解
问题定义:现有动态高斯溅射方法在相机运动较小或场景动态性较强时,重建效果不佳。这些方法通常依赖于数据驱动的先验知识进行正则化,但这些先验知识往往偏向于训练数据,并且忽略了更广泛的运动动态。因此,如何在缺乏足够相机运动的情况下,准确重建动态场景的三维结构是一个挑战。
核心思路:本文的核心思路是将经典的Lucas-Kanade光流算法的思想引入到动态高斯溅射中。通过分析前向扭曲场网络的内在属性,推导出一个解析的速度场,该速度场能够反映场景中物体的运动信息。然后,利用这个速度场对高斯体的运动进行约束,从而提高重建的准确性和鲁棒性。
技术框架:该方法主要包含以下几个步骤:1) 使用动态高斯溅射方法初始化场景的三维结构;2) 利用前向扭曲场网络计算场景中每个点的速度场;3) 将Lucas-Kanade光流算法应用于速度场,得到更精确的运动估计;4) 利用运动估计的结果对高斯体的位置和形状进行更新;5) 重复步骤2-4,直到收敛。
关键创新:该方法最重要的创新点在于将经典的Lucas-Kanade光流算法与动态高斯溅射相结合。通过利用前向扭曲场网络的内在属性,推导出一个解析的速度场,从而能够更准确地估计场景中物体的运动。与现有方法相比,该方法不需要依赖于数据驱动的先验知识,因此具有更好的泛化能力。
关键设计:该方法的关键设计包括:1) 前向扭曲场网络的结构和参数设置;2) Lucas-Kanade光流算法的具体实现;3) 如何将运动估计的结果有效地应用于高斯体的更新;4) 损失函数的设计,用于优化高斯体的参数。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法在合成和真实场景中都取得了显著的性能提升。特别是在相机运动较小、场景动态性较强的场景下,该方法的重建效果明显优于现有方法。具体的性能数据未知,但论文强调了在具有挑战性的场景下的优越性。
🎯 应用场景
该研究成果可应用于机器人导航、自动驾驶、增强现实等领域。在这些应用中,准确地重建动态场景的三维结构至关重要。例如,在自动驾驶中,需要准确地感知周围车辆和行人的运动,才能做出正确的决策。该方法能够提高动态场景三维重建的准确性和鲁棒性,从而提高这些应用的性能。
📄 摘要(原文)
Gaussian Splatting and its dynamic extensions are effective for reconstructing 3D scenes from 2D images when there is significant camera movement to facilitate motion parallax and when scene objects remain relatively static. However, in many real-world scenarios, these conditions are not met. As a consequence, data-driven semantic and geometric priors have been favored as regularizers, despite their bias toward training data and their neglect of broader movement dynamics. Departing from this practice, we propose a novel analytical approach that adapts the classical Lucas-Kanade method to dynamic Gaussian splatting. By leveraging the intrinsic properties of the forward warp field network, we derive an analytical velocity field that, through time integration, facilitates accurate scene flow computation. This enables the precise enforcement of motion constraints on warp fields, thus constraining both 2D motion and 3D positions of the Gaussians. Our method excels in reconstructing highly dynamic scenes with minimal camera movement, as demonstrated through experiments on both synthetic and real-world scenes.