Controllable Navigation Instruction Generation with Chain of Thought Prompting
作者: Xianghao Kong, Jinyu Chen, Wenguan Wang, Hang Su, Xiaolin Hu, Yi Yang, Si Liu
分类: cs.CV, cs.AI
发布日期: 2024-07-10 (更新: 2024-07-16)
备注: ECCV 2024
DOI: 10.1007/978-3-031-73397-0_3
💡 一句话要点
提出C-Instructor,利用思维链提示实现可控的导航指令生成
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 指令生成 大型语言模型 思维链 可控生成 导航 空间建模 风格迁移
📋 核心要点
- 现有指令生成模型缺乏对生成指令风格和内容的有效控制,且忽略了环境的空间信息。
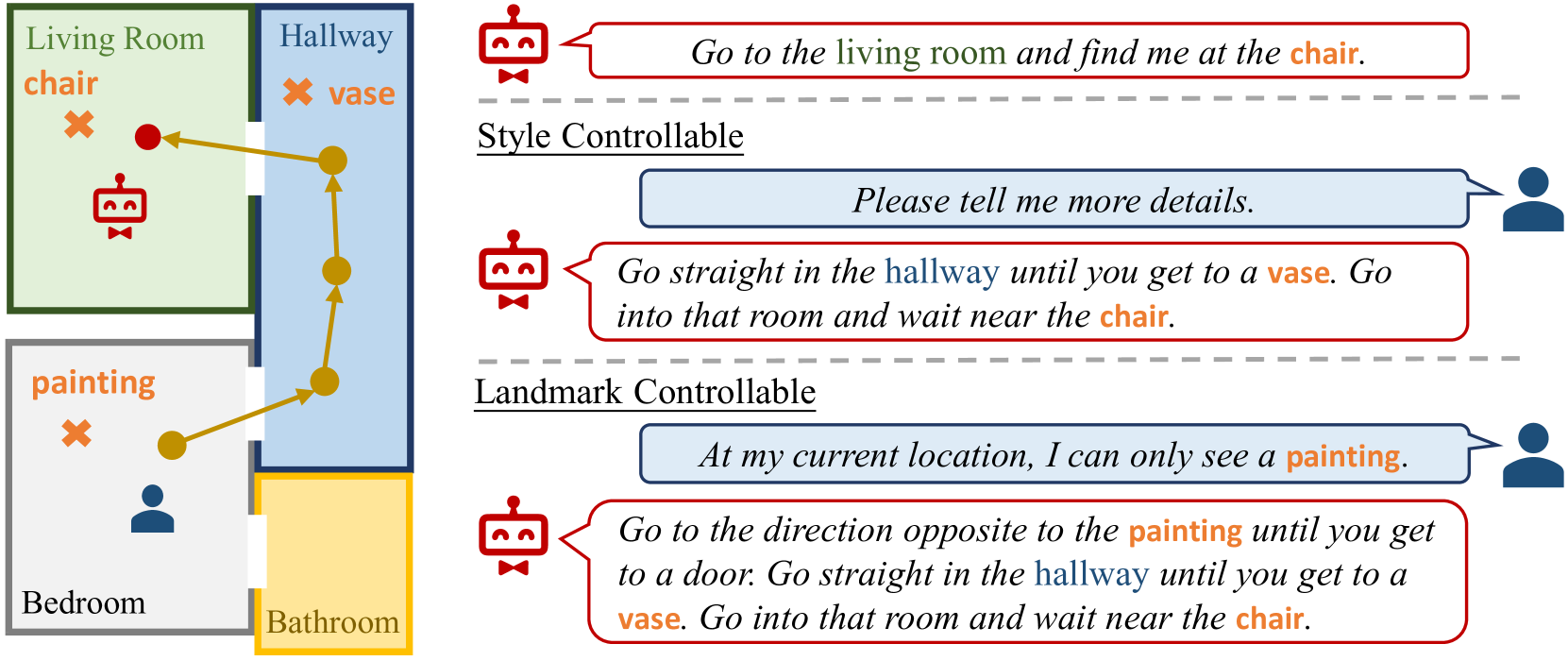
- C-Instructor利用思维链提示,结合地标信息,实现风格和内容可控的指令生成。
- 实验结果表明,C-Instructor在文本指标、导航指导和用户体验上均优于现有方法。
📝 摘要(中文)
指令生成是一个重要的多学科研究领域,具有广泛的应用。现有的指令生成模型仅限于从特定数据集中生成单一风格的指令,并且无法控制生成指令的风格和内容。此外,大多数现有的指令生成方法也忽略了导航环境的空间建模。本文利用大型语言模型(LLMs)的能力,提出了C-Instructor,它利用思维链风格的提示来实现风格可控和内容可控的指令生成。首先,我们提出了一种带有地标的思维链(CoTL)机制,该机制引导LLM识别关键地标,然后生成完整的指令。CoTL使生成的指令更容易遵循,并提供对地标对象操作的更大可控性。此外,我们提出了一个空间拓扑建模任务,以促进对环境空间结构的理解。最后,我们引入了一种风格混合训练策略,利用LLM的先验知识,使单个模型实例能够基于不同的提示进行风格控制的指令生成。大量的实验表明,C-Instructor生成的指令在文本指标、导航指导评估和用户研究方面优于以前的方法。
🔬 方法详解
问题定义:现有指令生成模型主要存在三个痛点:一是无法控制生成指令的风格,二是无法控制生成指令的内容,三是忽略了导航环境的空间结构信息。这些限制导致生成的指令难以适应不同的应用场景,且导航效率不高。
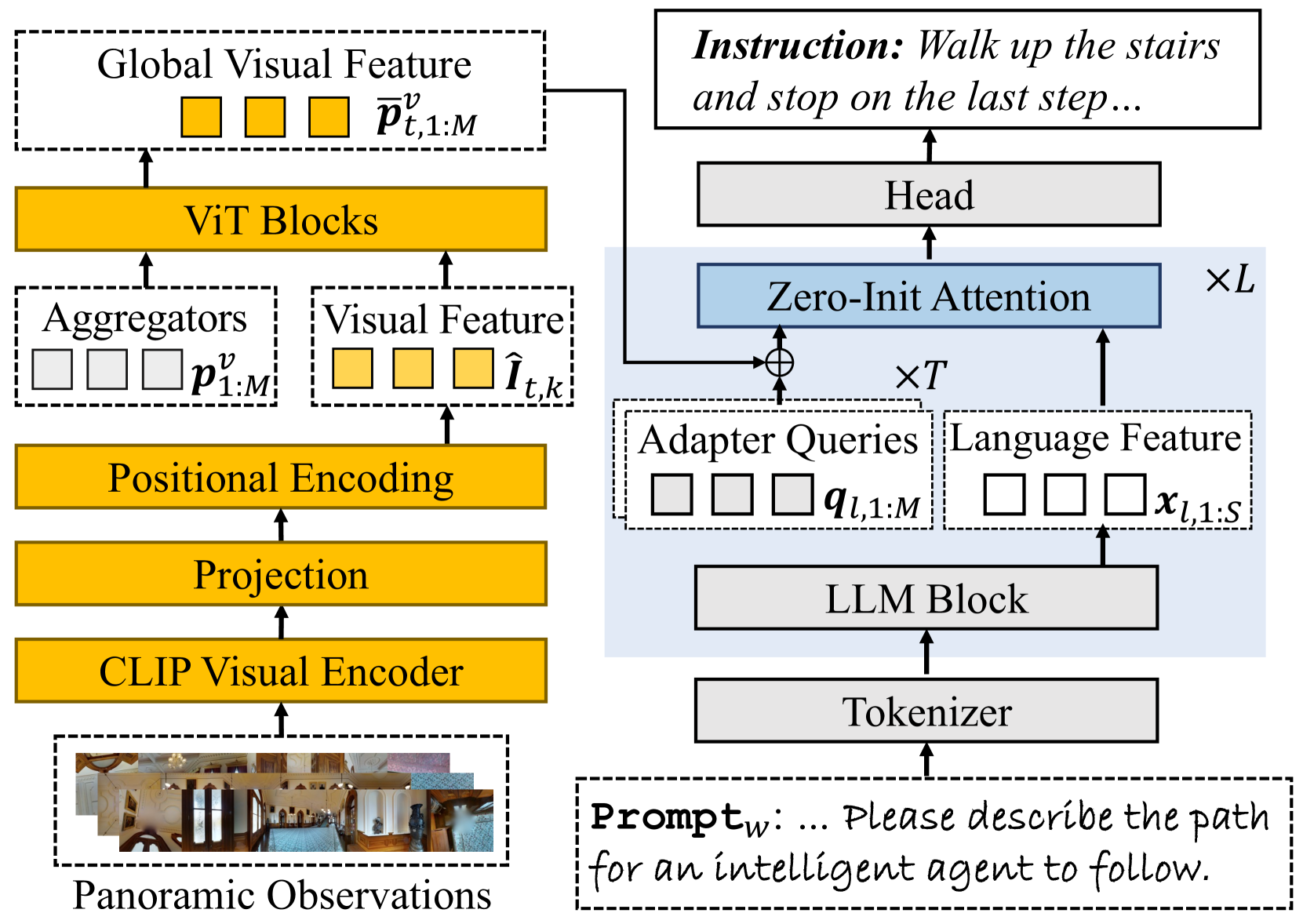
核心思路:本文的核心思路是利用大型语言模型(LLMs)的强大能力,通过设计合适的提示(Prompt)来引导LLM生成高质量的导航指令。具体来说,通过引入“思维链(Chain of Thought)”的方式,让LLM逐步推理,先识别关键地标,再生成完整的指令,从而提高指令的可控性和可理解性。同时,加入空间拓扑建模任务,使LLM更好地理解环境的空间结构。
技术框架:C-Instructor的整体框架主要包含三个部分:1) 带有地标的思维链(CoTL)机制:用于引导LLM识别关键地标并生成指令;2) 空间拓扑建模任务:用于增强LLM对环境空间结构的理解;3) 风格混合训练策略:用于实现风格可控的指令生成。训练阶段,模型同时学习不同风格的指令生成任务。推理阶段,通过不同的提示词控制生成指令的风格。
关键创新:本文的关键创新在于:1) 提出了CoTL机制,将思维链与地标信息相结合,提高了指令的可控性和可理解性;2) 引入了空间拓扑建模任务,使模型能够更好地理解环境的空间结构;3) 提出了风格混合训练策略,实现了风格可控的指令生成。
关键设计:CoTL机制的关键在于如何选择合适的地标。论文中可能使用了某种地标选择算法(具体细节未知)。空间拓扑建模任务的具体实现方式(例如,使用何种网络结构、损失函数等)未知。风格混合训练策略的关键在于如何设计不同的提示词,以控制生成指令的风格。损失函数的设计也可能包含一些针对性的优化,具体细节未知。
🖼️ 关键图片

📊 实验亮点
C-Instructor在文本指标、导航指导评估和用户研究方面均优于现有方法。具体的性能数据(例如,BLEU score、导航成功率等)和提升幅度未知,需要在论文中查找。用户研究表明,C-Instructor生成的指令更易于理解和遵循。
🎯 应用场景
该研究成果可应用于机器人导航、自动驾驶、虚拟现实等领域。例如,可以为机器人提供更清晰、更易于理解的导航指令,提高机器人的导航效率和安全性。在虚拟现实中,可以生成个性化的导航指令,提升用户的沉浸式体验。此外,该技术还可以应用于智能家居、智能助手等领域,为用户提供更便捷的服务。
📄 摘要(原文)
Instruction generation is a vital and multidisciplinary research area with broad applications. Existing instruction generation models are limited to generating instructions in a single style from a particular dataset, and the style and content of generated instructions cannot be controlled. Moreover, most existing instruction generation methods also disregard the spatial modeling of the navigation environment. Leveraging the capabilities of Large Language Models (LLMs), we propose C-Instructor, which utilizes the chain-of-thought-style prompt for style-controllable and content-controllable instruction generation. Firstly, we propose a Chain of Thought with Landmarks (CoTL) mechanism, which guides the LLM to identify key landmarks and then generate complete instructions. CoTL renders generated instructions more accessible to follow and offers greater controllability over the manipulation of landmark objects. Furthermore, we present a Spatial Topology Modeling Task to facilitate the understanding of the spatial structure of the environment. Finally, we introduce a Style-Mixed Training policy, harnessing the prior knowledge of LLMs to enable style control for instruction generation based on different prompts within a single model instance. Extensive experiments demonstrate that instructions generated by C-Instructor outperform those generated by previous methods in text metrics, navigation guidance evaluation, and user studies.