Pamba: Enhancing Global Interaction in Point Clouds via State Space Model
作者: Zhuoyuan Li, Yubo Ai, Jiahao Lu, ChuXin Wang, Jiacheng Deng, Hanzhi Chang, Yanzhe Liang, Wenfei Yang, Shifeng Zhang, Tianzhu Zhang
分类: cs.CV
发布日期: 2024-06-25 (更新: 2025-01-13)
备注: Accepted by AAAI 2025
💡 一句话要点
提出Pamba,利用状态空间模型增强点云全局交互,实现高效语义分割。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 点云分割 状态空间模型 Mamba 全局建模 线性复杂度
📋 核心要点
- Transformer在点云分割中计算复杂度高,难以建模长程依赖。
- Pamba利用状态空间模型Mamba,结合多路径序列化和ConvMamba块,实现线性复杂度的全局建模。
- Pamba在ScanNet v2等数据集上取得SOTA结果,验证了其有效性。
📝 摘要(中文)
Transformer在3D点云语义分割任务中表现出色。然而,Transformer的二次复杂度导致计算成本高昂,限制了可同时处理的点数,并阻碍了单个场景中对象之间的长程依赖关系建模。受最近状态空间模型(SSM)在长序列建模方面的巨大潜力的启发,我们将基于SSM的Mamba架构引入点云领域,并提出了Pamba,一种在线性复杂度下具有强大全局建模能力的新型架构。具体来说,为了使点云的无序性适应Mamba的因果特性,我们提出了一种适用于点云的多路径序列化策略。此外,我们提出了ConvMamba块,以弥补Mamba在建模局部几何结构和单向建模方面的不足。Pamba在多个3D点云分割任务(包括ScanNet v2、ScanNet200、S3DIS和nuScenes)上获得了最先进的结果,并通过大量实验验证了其有效性。
🔬 方法详解
问题定义:现有基于Transformer的点云语义分割方法,由于Transformer的自注意力机制,计算复杂度呈二次方增长,导致无法有效处理大规模点云数据,并且难以捕捉场景中物体之间的长距离依赖关系。这限制了模型在复杂场景下的性能表现。
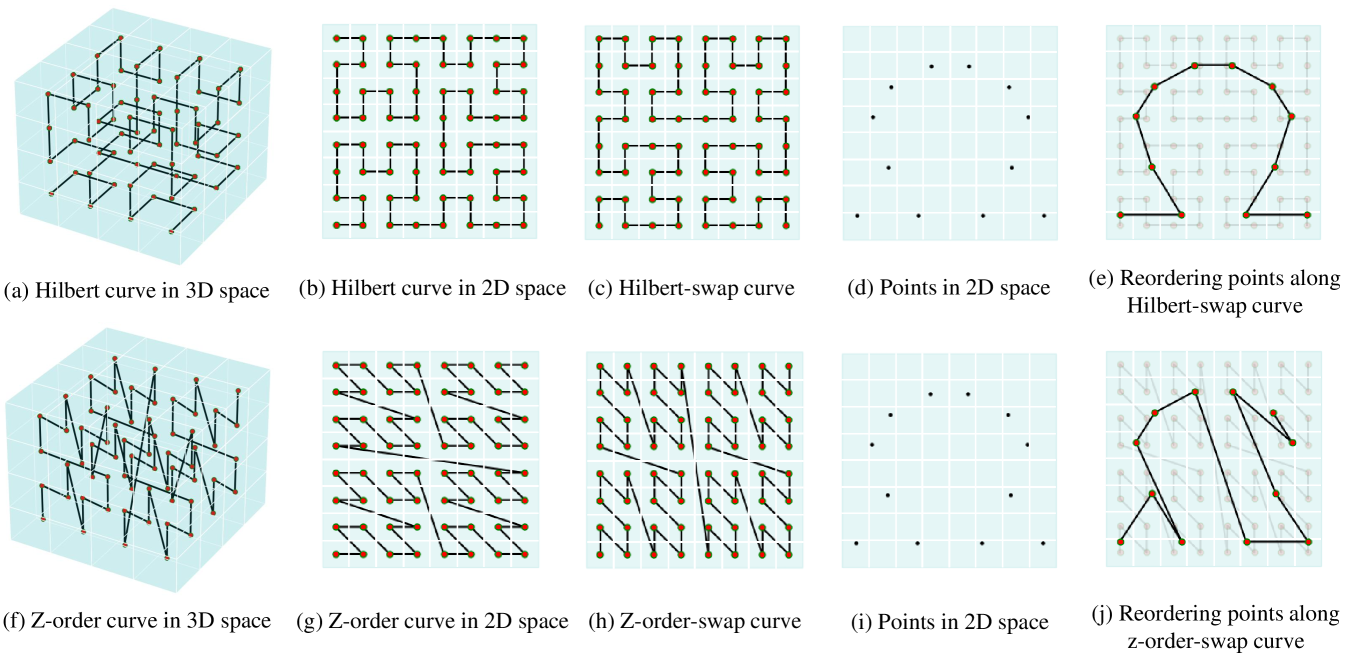
核心思路:论文的核心在于将状态空间模型(SSM),特别是Mamba架构,引入到点云处理领域。Mamba具有线性复杂度,能够高效地建模长序列数据。为了适应点云的无序性,论文提出了多路径序列化策略,将点云转换为适合Mamba处理的序列数据。同时,为了弥补Mamba在局部几何信息建模方面的不足,引入了ConvMamba块。
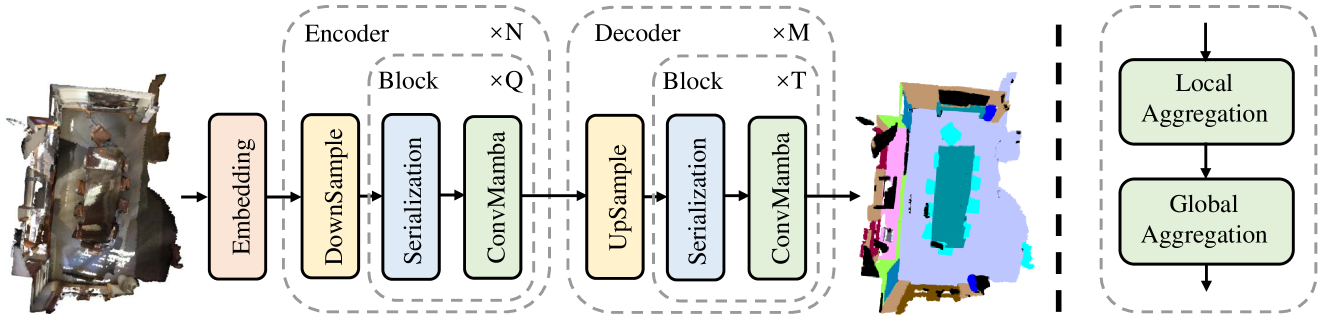
技术框架:Pamba的整体架构包含以下几个主要步骤:首先,通过多路径序列化策略将无序的点云数据转换为有序的序列数据;然后,利用堆叠的ConvMamba块对序列数据进行特征提取和全局信息建模;最后,通过解码器将序列特征映射回点云,并进行语义分割。ConvMamba块是Pamba的核心组成部分,它结合了卷积操作和Mamba模块,既能捕捉局部几何信息,又能建模全局依赖关系。
关键创新:Pamba的关键创新点在于:1) 将状态空间模型Mamba引入点云处理领域,实现了线性复杂度的全局建模;2) 提出了多路径序列化策略,解决了点云的无序性与Mamba的因果性之间的矛盾;3) 设计了ConvMamba块,弥补了Mamba在局部几何信息建模方面的不足。与传统的基于Transformer的方法相比,Pamba在计算效率和全局建模能力方面具有显著优势。
关键设计:多路径序列化策略的具体实现方式未知,但其核心思想是将点云数据沿着不同的路径进行排序,从而生成多个序列。ConvMamba块的具体结构未知,但可以推测其包含卷积层和Mamba模块,卷积层用于提取局部特征,Mamba模块用于建模全局依赖关系。损失函数和训练策略等细节未知。
🖼️ 关键图片

📊 实验亮点
Pamba在ScanNet v2、ScanNet200、S3DIS和nuScenes等多个3D点云分割任务上取得了state-of-the-art的结果。具体的性能数据和提升幅度未知,但论文强调了Pamba在全局建模能力和计算效率方面的优势。
🎯 应用场景
Pamba具有广泛的应用前景,包括自动驾驶、机器人导航、三维场景理解、虚拟现实等领域。通过高效地处理大规模点云数据,Pamba可以帮助这些应用更好地理解周围环境,从而提高系统的性能和安全性。未来,Pamba有望成为三维视觉领域的重要基础模型。
📄 摘要(原文)
Transformers have demonstrated impressive results for 3D point cloud semantic segmentation. However, the quadratic complexity of transformer makes computation costs high, limiting the number of points that can be processed simultaneously and impeding the modeling of long-range dependencies between objects in a single scene. Drawing inspiration from the great potential of recent state space models (SSM) for long sequence modeling, we introduce Mamba, an SSM-based architecture, to the point cloud domain and propose Pamba, a novel architecture with strong global modeling capability under linear complexity. Specifically, to make the disorderness of point clouds fit in with the causal nature of Mamba, we propose a multi-path serialization strategy applicable to point clouds. Besides, we propose the ConvMamba block to compensate for the shortcomings of Mamba in modeling local geometries and in unidirectional modeling. Pamba obtains state-of-the-art results on several 3D point cloud segmentation tasks, including ScanNet v2, ScanNet200, S3DIS and nuScenes, while its effectiveness is validated by extensive experiments.