ProMotion: Prototypes As Motion Learners
作者: Yawen Lu, Dongfang Liu, Qifan Wang, Cheng Han, Yiming Cui, Zhiwen Cao, Xueling Zhang, Yingjie Victor Chen, Heng Fan
分类: cs.CV
发布日期: 2024-06-07
备注: 11 pages
💡 一句话要点
ProMotion:提出基于原型学习的统一运动建模框架,提升多种运动任务性能
🎯 匹配领域: 支柱六:视频提取与匹配 (Video Extraction) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 运动学习 原型学习 深度估计 光流估计 特征去噪 通用模型 计算机视觉
📋 核心要点
- 现有运动学习方法通常针对特定任务设计,缺乏通用性和泛化能力,难以同时处理多种运动信息。
- ProMotion采用原型学习的视角,构建统一的运动学习框架,通过特征去噪和原型学习双重机制增强运动表示的鲁棒性。
- 实验表明,ProMotion在2D和3D运动任务上均优于专用架构,并在深度估计和光流估计任务上取得了显著提升。
📝 摘要(中文)
本文介绍了一种名为ProMotion的统一原型框架,旨在对基础运动任务进行建模。ProMotion提供了一系列引人注目的属性,使其与当前特定于任务的范例区分开来。我们采用了一种原型视角,建立了一个统一的范例,协调不同的运动学习方法。这种新颖的范例简化了架构设计,能够同时吸收各种运动信息。我们利用涉及特征去噪器和原型学习器的双重机制来解读运动的复杂性。这种方法有效地规避了像素级特征匹配中的歧义缺陷,显著增强了运动表示的鲁棒性。我们展示了不同运动模式之间的高度可迁移性。这种固有的多功能性在全面的2D和3D下游任务中得到了强有力的体现。实验结果表明,ProMotion优于各种著名的专用架构,在Sintel和KITTI深度数据集上分别实现了0.54和0.054的Abs Rel误差,在Sintel flow基准测试的clean和final pass上分别实现了1.04和2.01的平均端点误差,在KITTI flow基准测试上实现了4.30的F1-all误差。鉴于其有效性,我们希望我们的工作能够促进计算机视觉中通用模型的范式转变。
🔬 方法详解
问题定义:现有运动学习方法通常是任务特定的,例如,深度估计、光流估计等任务需要单独设计网络结构和损失函数。这种方式难以共享不同任务之间的知识,并且泛化能力有限。此外,像素级别的特征匹配容易受到噪声和遮挡的影响,导致运动表示不准确。
核心思路:ProMotion的核心思路是将不同的运动学习任务统一到一个基于原型学习的框架中。通过学习一组具有代表性的运动原型,可以更好地捕捉运动的本质特征,从而提高模型的泛化能力和鲁棒性。同时,引入特征去噪器来减少噪声的影响,提高特征的质量。
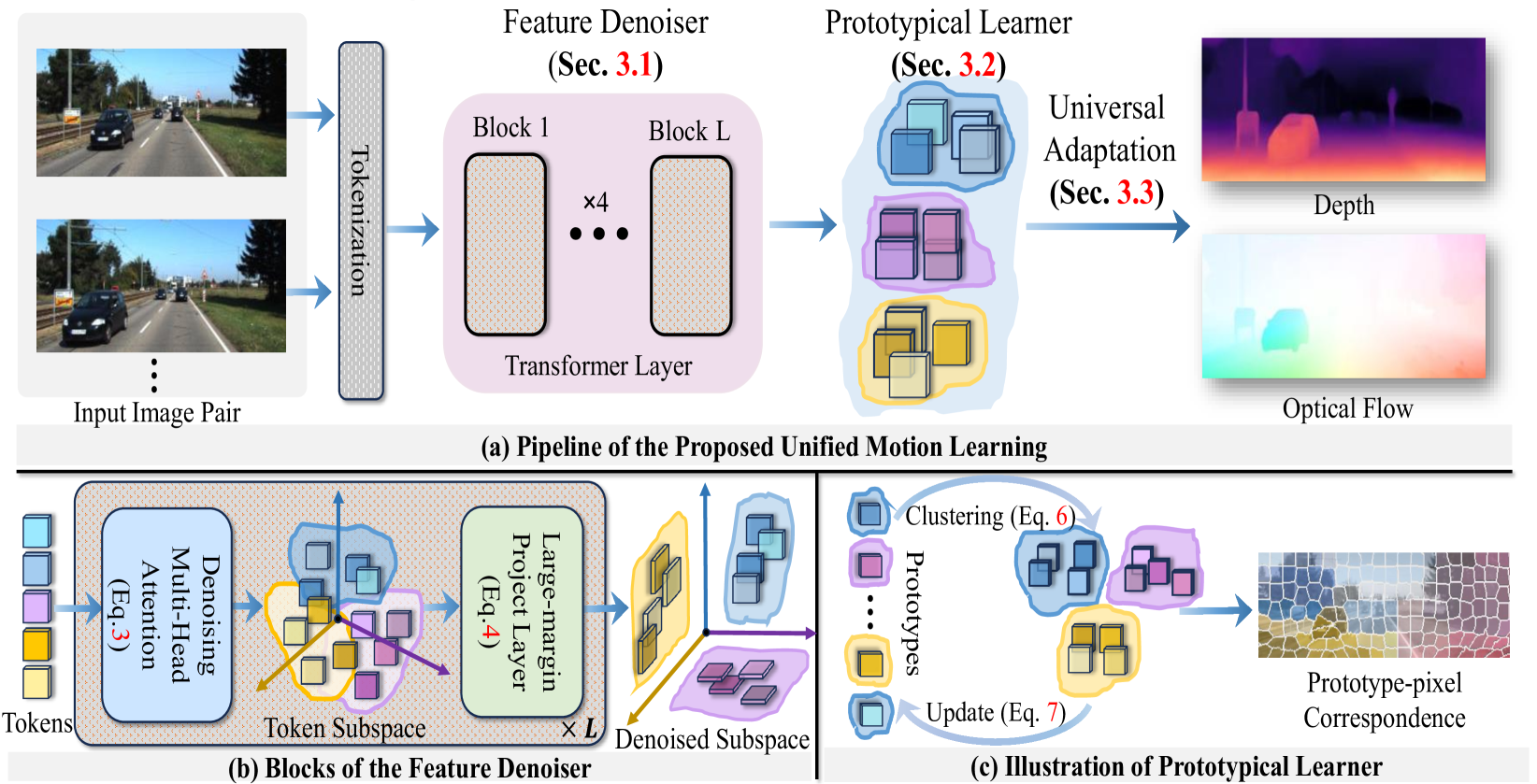
技术框架:ProMotion框架主要包含三个模块:特征提取器、特征去噪器和原型学习器。首先,特征提取器从输入图像中提取特征。然后,特征去噪器对提取的特征进行去噪,减少噪声的影响。最后,原型学习器将去噪后的特征与一组预定义的运动原型进行比较,从而预测运动信息。整个框架采用端到端的方式进行训练。
关键创新:ProMotion的关键创新在于将原型学习引入到运动学习领域,并设计了特征去噪器来提高特征的质量。与传统的像素级别特征匹配方法相比,原型学习可以更好地捕捉运动的本质特征,并且对噪声和遮挡具有更强的鲁棒性。此外,统一的框架设计使得ProMotion可以同时处理多种运动学习任务。
关键设计:ProMotion的关键设计包括:1) 特征去噪器的设计,采用自编码器结构,学习如何从噪声特征中恢复原始特征;2) 原型学习器的设计,采用余弦相似度来衡量特征与原型之间的相似度,并使用交叉熵损失函数进行训练;3) 损失函数的设计,综合考虑了深度估计、光流估计等不同任务的损失函数,并进行加权平均。
🖼️ 关键图片
📊 实验亮点
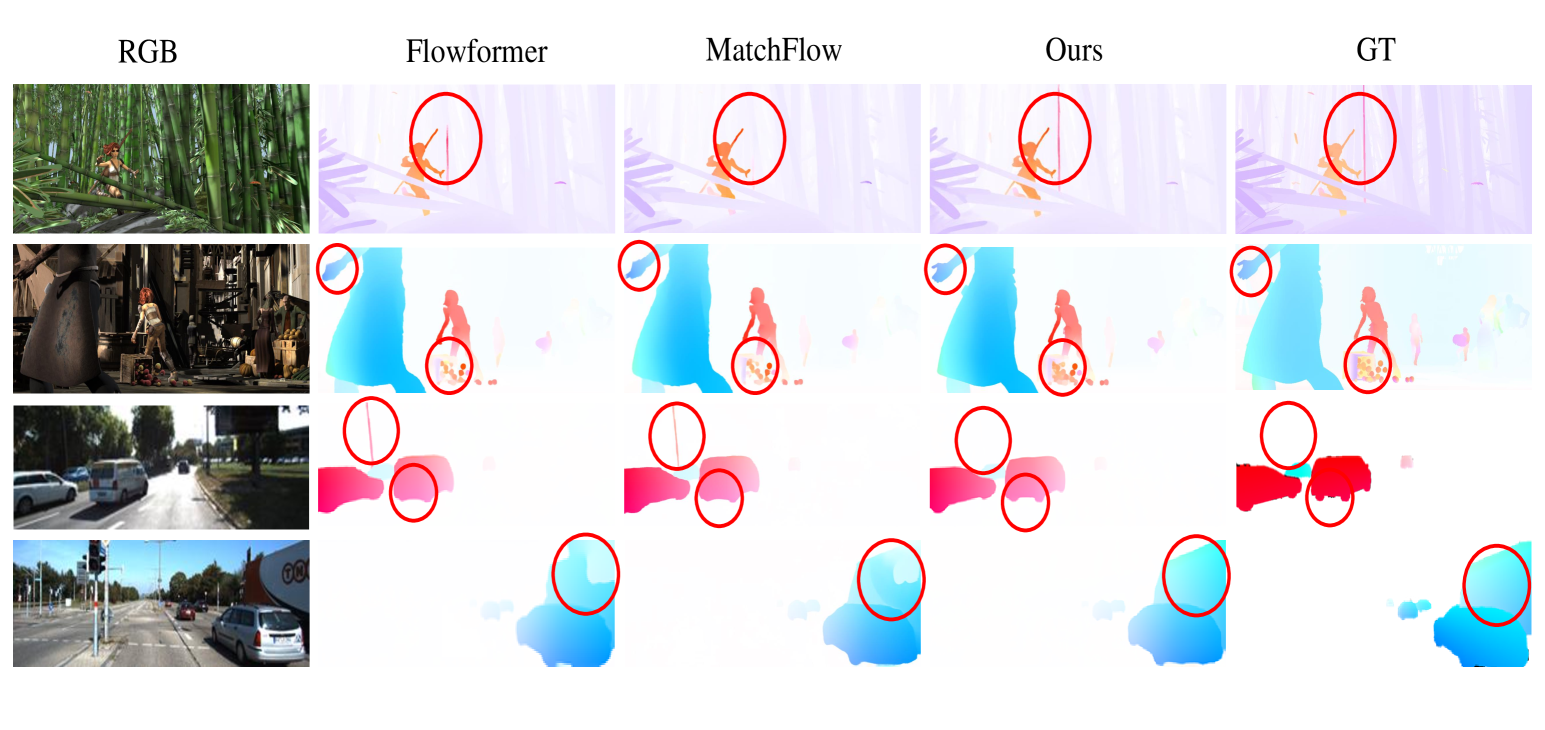
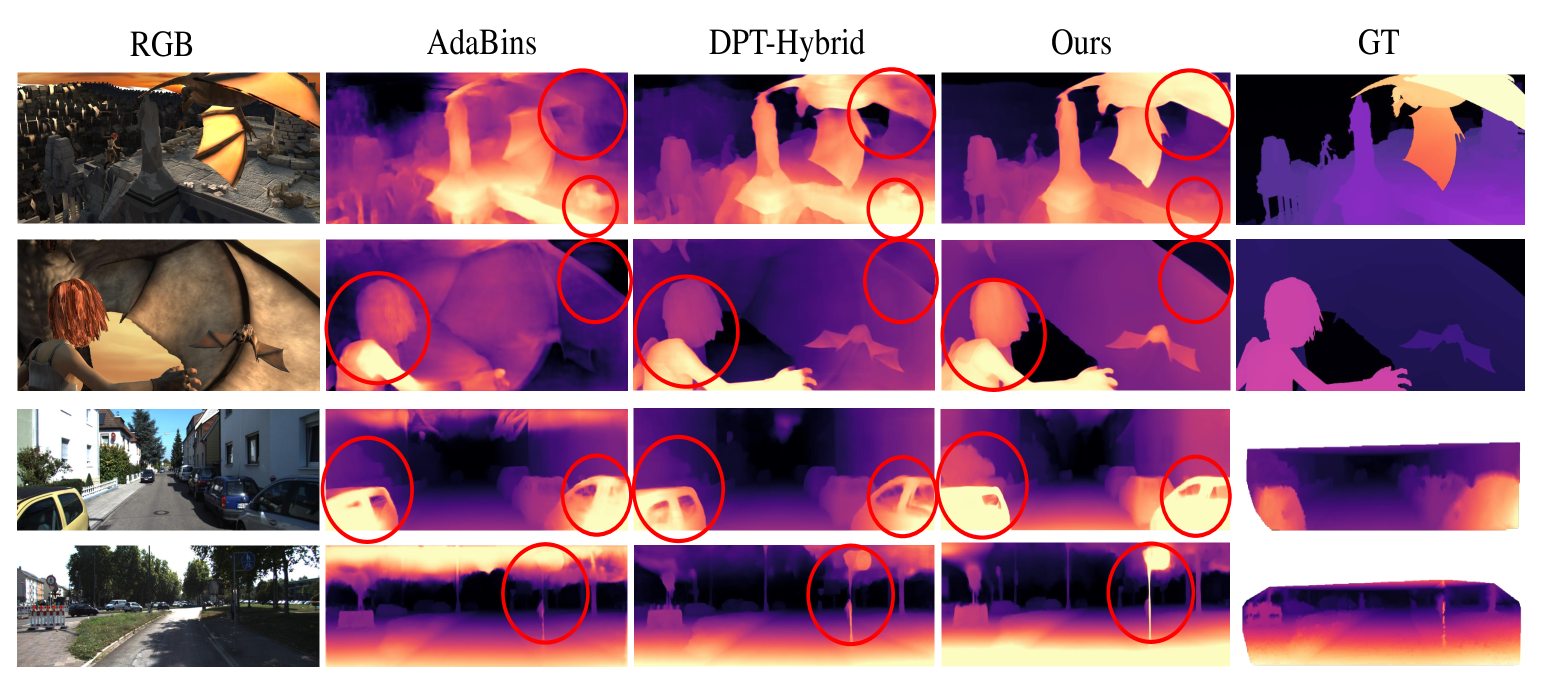
ProMotion在多个运动学习基准测试中取得了显著的性能提升。在Sintel和KITTI深度数据集上,ProMotion分别实现了0.54和0.054的Abs Rel误差,优于其他方法。在Sintel flow基准测试的clean和final pass上,ProMotion分别实现了1.04和2.01的平均端点误差。在KITTI flow基准测试上,ProMotion实现了4.30的F1-all误差。这些结果表明,ProMotion具有很强的竞争力。
🎯 应用场景
ProMotion具有广泛的应用前景,例如自动驾驶、机器人导航、视频监控等。在自动驾驶领域,ProMotion可以用于估计车辆周围环境的深度信息和运动信息,从而帮助车辆做出更安全的决策。在机器人导航领域,ProMotion可以用于估计机器人的运动状态和周围环境的结构,从而帮助机器人更好地规划路径。在视频监控领域,ProMotion可以用于检测异常运动行为,从而提高监控系统的安全性。
📄 摘要(原文)
In this work, we introduce ProMotion, a unified prototypical framework engineered to model fundamental motion tasks. ProMotion offers a range of compelling attributes that set it apart from current task-specific paradigms. We adopt a prototypical perspective, establishing a unified paradigm that harmonizes disparate motion learning approaches. This novel paradigm streamlines the architectural design, enabling the simultaneous assimilation of diverse motion information. We capitalize on a dual mechanism involving the feature denoiser and the prototypical learner to decipher the intricacies of motion. This approach effectively circumvents the pitfalls of ambiguity in pixel-wise feature matching, significantly bolstering the robustness of motion representation. We demonstrate a profound degree of transferability across distinct motion patterns. This inherent versatility reverberates robustly across a comprehensive spectrum of both 2D and 3D downstream tasks. Empirical results demonstrate that ProMotion outperforms various well-known specialized architectures, achieving 0.54 and 0.054 Abs Rel error on the Sintel and KITTI depth datasets, 1.04 and 2.01 average endpoint error on the clean and final pass of Sintel flow benchmark, and 4.30 F1-all error on the KITTI flow benchmark. For its efficacy, we hope our work can catalyze a paradigm shift in universal models in computer vision.