Improving Gaussian Splatting with Localized Points Management
作者: Haosen Yang, Chenhao Zhang, Wenqing Wang, Marco Volino, Adrian Hilton, Li Zhang, Xiatian Zhu
分类: cs.CV
发布日期: 2024-06-06 (更新: 2025-04-19)
备注: CVPR 2025 (Highlight). Github: https://happy-hsy.github.io/projects/LPM/
💡 一句话要点
提出局部化点管理策略,提升高斯溅射模型在复杂区域的渲染质量
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 高斯溅射 点云管理 三维重建 渲染优化 局部化策略
📋 核心要点
- 现有高斯溅射的点管理方法在复杂区域表现不佳,无法有效识别所有需要密集化的区域,也难以处理病态点。
- 提出局部化点管理策略,利用多视角几何约束和渲染误差识别需要点添加和几何校准的区域。
- 实验表明,该方法能显著提升静态和动态高斯溅射模型的渲染质量,并在多个数据集上达到SOTA。
📝 摘要(中文)
本文针对3D高斯溅射模型优化中点管理的关键问题,指出传统自适应密度控制(ADC)算法在处理复杂图像区域(如透明区域)时的局限性,无法充分识别需要点密集化的3D区域,且缺乏处理病态点(如错误高透明度导致的遮挡)的有效机制。为此,提出一种局部化点管理(LPM)策略,通过多视角几何约束和图像渲染误差识别需要点添加和几何校准的区域。在识别区域进行点密集化,并重置区域前方点的透明度,为校正病态点创造机会。LPM可无缝集成到现有静态3D和动态4D高斯溅射模型中,且计算成本低。实验结果验证了LPM在提升各种3D/4D模型质量方面的有效性,在Tanks & Temples和Neural 3D Video等数据集上,LPM改进了静态3DGS和动态SpaceTimeGS,实现了最先进的渲染质量,并保持了实时速度。
🔬 方法详解
问题定义:3D高斯溅射模型依赖于有效的点管理策略来优化渲染质量。现有的自适应密度控制(ADC)算法在处理复杂场景,特别是包含透明区域或遮挡关系的场景时,存在局限性。ADC无法准确识别所有需要进行点密集化的3D区域,并且缺乏有效机制来处理因错误的高透明度等原因导致的病态点,这些病态点会降低渲染质量。
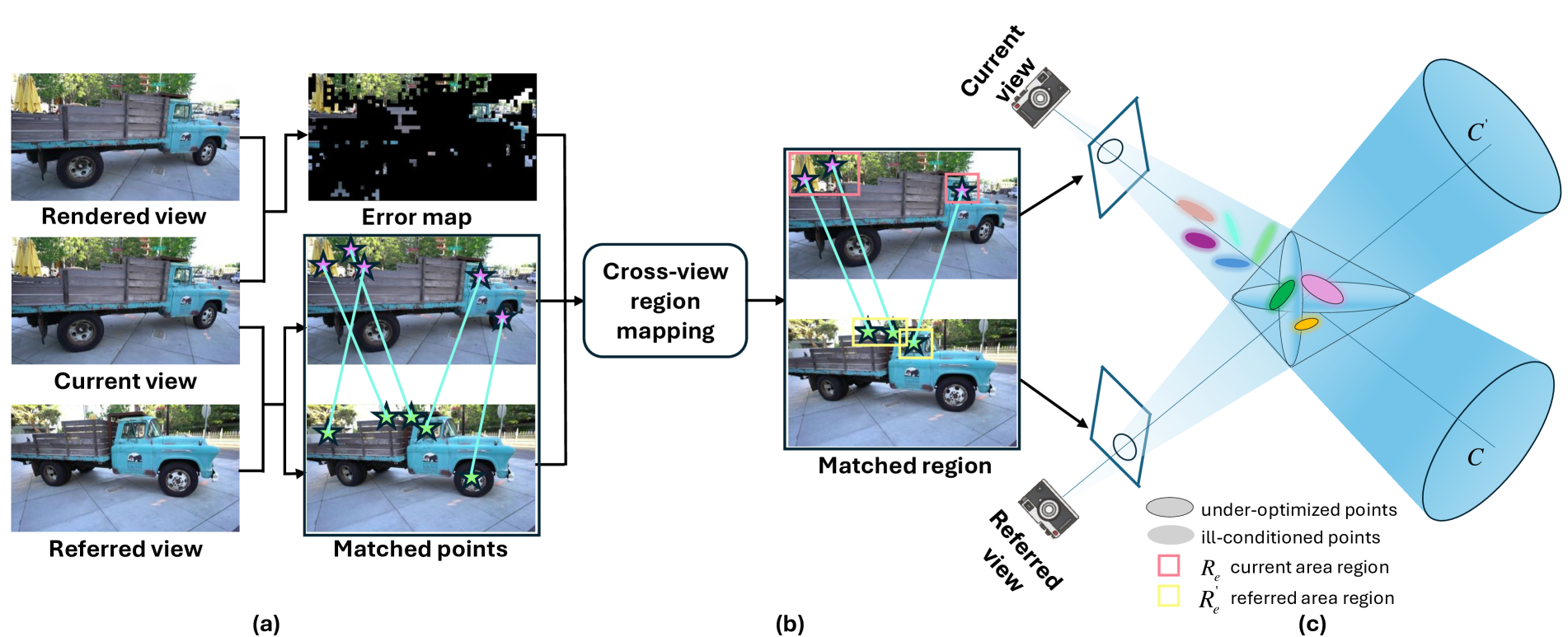
核心思路:本文的核心思路是基于多视角几何约束和图像渲染误差,局部化地识别需要进行点添加和几何校准的区域。通过分析渲染误差,可以定位到模型表现不佳的区域,然后针对这些区域进行更精细的点管理操作。这种局部化的方法能够更有效地利用计算资源,并避免全局操作可能引入的噪声。
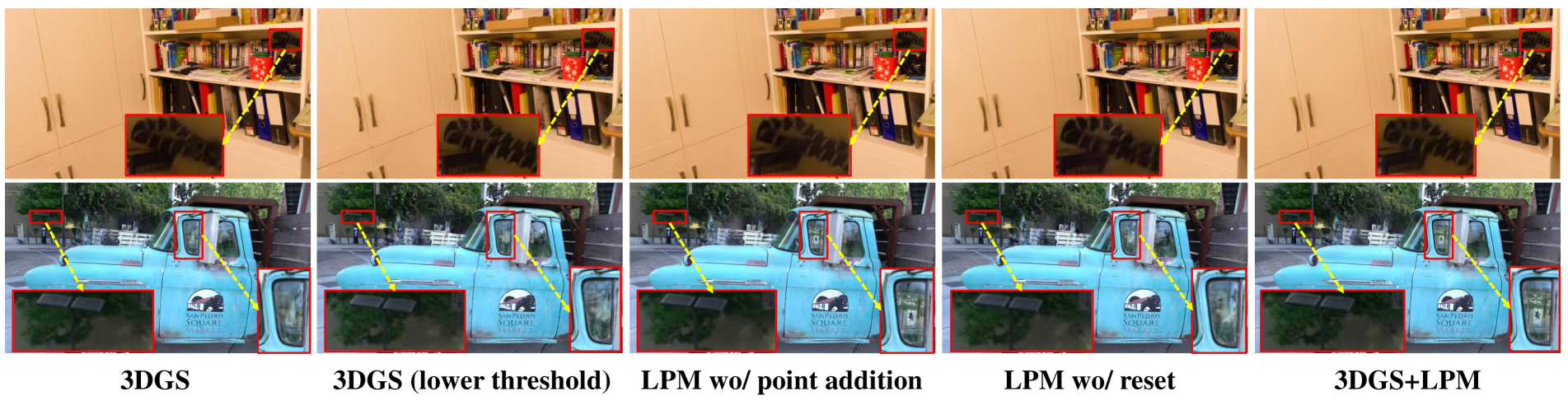
技术框架:LPM作为一个插件,可以集成到现有的3D/4D高斯溅射模型中。其主要流程包括:1) 利用多视角几何约束和图像渲染误差识别需要进行点密集化的区域;2) 在识别出的区域进行点密集化操作,增加高斯点的数量;3) 重置这些区域前方的高斯点的透明度,为后续优化提供机会。
关键创新:LPM的关键创新在于其局部化的点管理策略。与全局的ADC算法不同,LPM能够根据渲染误差自适应地调整点密度,从而更有效地处理复杂场景。此外,通过重置特定区域前方点的透明度,LPM能够更好地校正病态点,提高渲染质量。
关键设计:LPM的关键设计包括:1) 使用多视角几何约束来提高区域识别的准确性;2) 基于渲染误差的自适应点密集化策略;3) 针对特定区域的透明度重置机制。具体的参数设置和损失函数可能需要根据具体的应用场景进行调整,但整体框架具有很强的通用性。
🖼️ 关键图片
📊 实验亮点
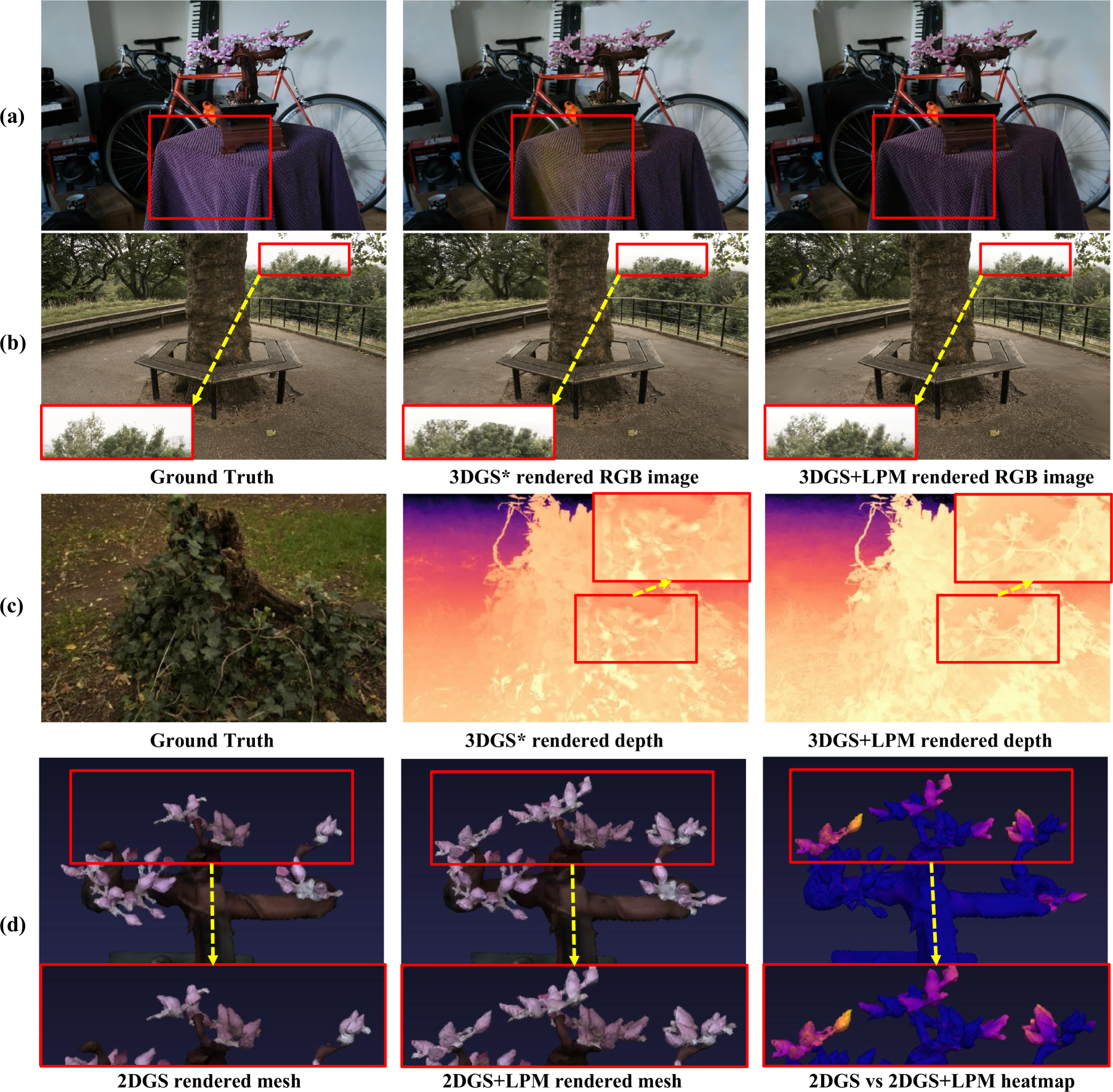
实验结果表明,LPM能够显著提升现有3D/4D高斯溅射模型的渲染质量。在Tanks & Temples数据集和Neural 3D Video数据集上,LPM改进了静态3DGS和动态SpaceTimeGS,实现了最先进的渲染质量,同时保持了实时渲染速度。相较于基线方法,LPM在PSNR、SSIM等指标上均有显著提升。
🎯 应用场景
该研究成果可广泛应用于三维重建、虚拟现实、增强现实、自动驾驶等领域。通过提升高斯溅射模型的渲染质量,可以为用户提供更逼真、更沉浸式的体验。在自动驾驶领域,高质量的三维场景重建有助于提高环境感知能力,从而提升驾驶安全性。该方法在动态场景的重建和渲染方面也具有潜力,为动态环境下的应用提供了新的可能性。
📄 摘要(原文)
Point management is critical for optimizing 3D Gaussian Splatting models, as point initiation (e.g., via structure from motion) is often distributionally inappropriate. Typically, Adaptive Density Control (ADC) algorithm is adopted, leveraging view-averaged gradient magnitude thresholding for point densification, opacity thresholding for pruning, and regular all-points opacity reset. We reveal that this strategy is limited in tackling intricate/special image regions (e.g., transparent) due to inability of identifying all 3D zones requiring point densification, and lacking an appropriate mechanism to handle ill-conditioned points with negative impacts (e.g., occlusion due to false high opacity). To address these limitations, we propose a Localized Point Management (LPM) strategy, capable of identifying those error-contributing zones in greatest need for both point addition and geometry calibration. Zone identification is achieved by leveraging the underlying multiview geometry constraints, subject to image rendering errors. We apply point densification in the identified zones and then reset the opacity of the points in front of these regions, creating a new opportunity to correct poorly conditioned points. Serving as a versatile plugin, LPM can be seamlessly integrated into existing static 3D and dynamic 4D Gaussian Splatting models with minimal additional cost. Experimental evaluations validate the efficacy of our LPM in boosting a variety of existing 3D/4D models both quantitatively and qualitatively. Notably, LPM improves both static 3DGS and dynamic SpaceTimeGS to achieve state-of-the-art rendering quality while retaining real-time speeds, excelling on challenging datasets such as Tanks & Temples and the Neural 3D Video dataset.