VHS: High-Resolution Iterative Stereo Matching with Visual Hull Priors
作者: Markus Plack, Hannah Dröge, Leif Van Holland, Matthias B. Hullin
分类: cs.CV
发布日期: 2024-06-04
💡 一句话要点
提出基于Visual Hull先验的高分辨率迭代立体匹配方法,用于体绘制系统。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 立体匹配 深度估计 Visual Hull 体绘制 高分辨率图像
📋 核心要点
- 现有高分辨率立体匹配方法计算量大,搜索空间广,难以满足体绘制系统对精确深度的需求。
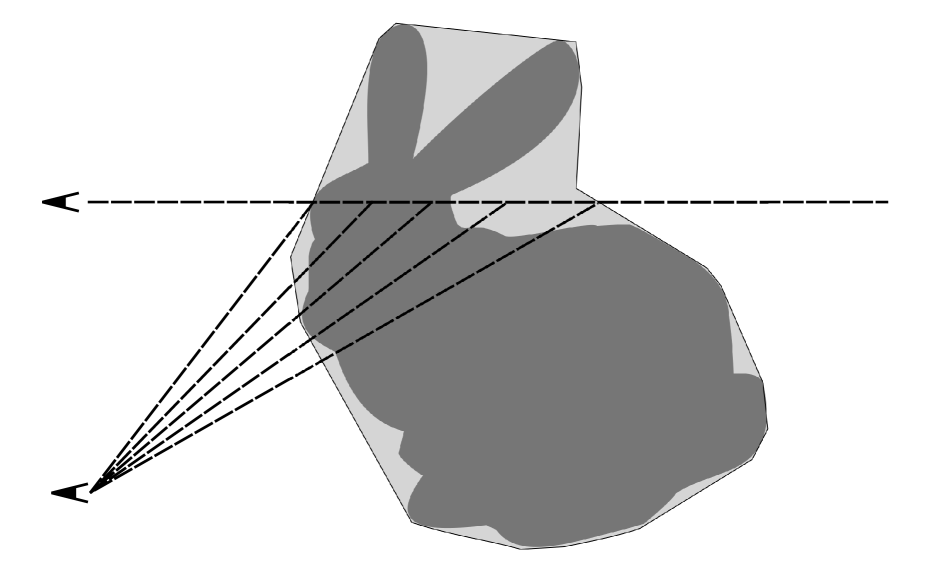
- 利用从补充视图提取的Visual Hull作为先验,缩小视差搜索空间,指导立体匹配,提升效率和精度。
- 提出混合稀疏-稠密相关计算方案,并设计训练方法,降低内存需求,使高分辨率数据训练成为可能。
📝 摘要(中文)
本文提出了一种立体匹配方法,利用Visual Hull作为先验知识,从高分辨率图像中估计深度,并采用一种内存高效的相关性计算技术。该方法使用从场景的补充视图中提取的对象掩码来指导视差估计,有效地减少了匹配的搜索空间。这种方法专门为体绘制系统中的立体相机阵列定制,其中精确的深度在下游重建任务中起着关键作用。为了在高分辨率下进行训练和回归,该方法将稀疏相关计算扩展到一种混合稀疏-稠密方案,适用于领先的循环网络架构。我们评估了该方法与最先进方法相比的性能-效率权衡,并证明了Visual Hull指导的有效性。此外,我们提出了一种训练方案,进一步降低了优化过程中的内存需求,从而促进了高分辨率数据的训练。
🔬 方法详解
问题定义:论文旨在解决高分辨率图像的立体匹配问题,尤其是在体绘制系统中。现有方法在高分辨率图像上进行立体匹配时,计算复杂度高,内存消耗大,难以实现实时或高效的深度估计。此外,缺乏有效的先验信息来约束搜索空间,导致匹配精度受限。
核心思路:论文的核心思路是利用Visual Hull作为先验知识来指导立体匹配过程。Visual Hull提供了场景几何形状的粗略估计,可以用来缩小视差搜索范围,从而降低计算复杂度和提高匹配精度。此外,论文还提出了一种混合稀疏-稠密相关计算方案,以进一步提高计算效率。
技术框架:该方法主要包含以下几个阶段:1) 从补充视图中提取对象掩码,构建Visual Hull;2) 利用Visual Hull先验缩小视差搜索范围;3) 使用混合稀疏-稠密相关计算方案计算匹配代价;4) 使用循环神经网络进行视差回归,得到最终的深度图。
关键创新:该方法最重要的技术创新点在于将Visual Hull先验引入到高分辨率立体匹配中,并提出了一种混合稀疏-稠密相关计算方案。Visual Hull先验能够有效地约束搜索空间,提高匹配精度和效率。混合稀疏-稠密相关计算方案能够在保证精度的前提下,显著降低计算复杂度。
关键设计:在网络结构方面,论文采用了循环神经网络进行视差回归,能够有效地利用上下文信息。在损失函数方面,论文采用了L1损失函数和Smooth L1损失函数相结合的方式,以提高深度估计的精度和鲁棒性。此外,论文还提出了一种训练方案,通过梯度累积等技术,进一步降低了训练过程中的内存需求。
🖼️ 关键图片

📊 实验亮点
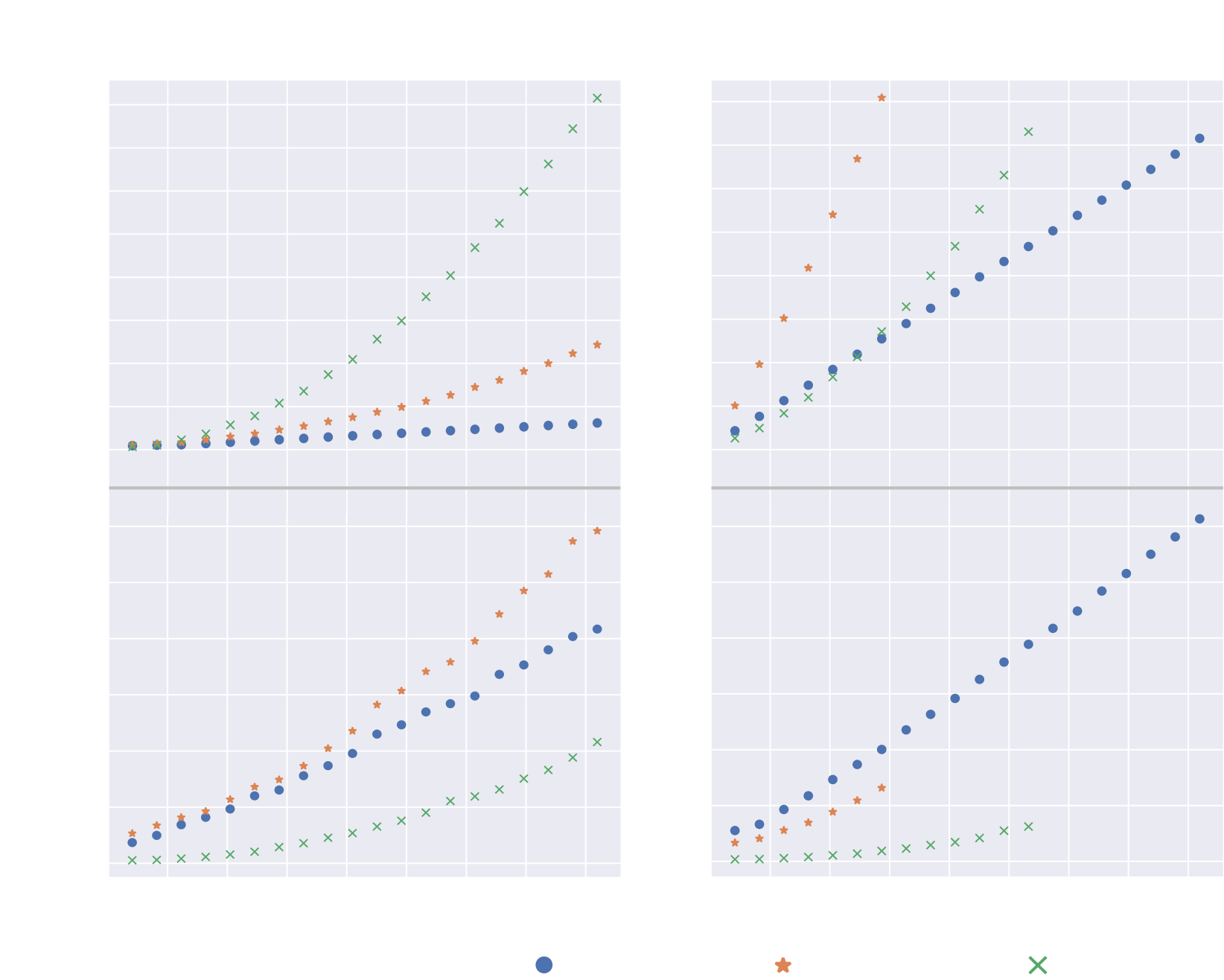
实验结果表明,该方法在保持较高深度估计精度的同时,显著降低了计算复杂度和内存消耗。与现有方法相比,该方法能够在高分辨率图像上实现更高效、更精确的立体匹配。Visual Hull先验的使用有效地提升了匹配精度,混合稀疏-稠密相关计算方案则降低了计算成本。
🎯 应用场景
该研究成果可应用于体绘制、三维重建、虚拟现实、增强现实等领域。尤其是在需要高精度、高分辨率深度信息的场景下,例如高质量的虚拟人物生成、电影特效制作、以及工业检测等,具有重要的应用价值和潜力。该方法能够提升相关应用的真实感和用户体验。
📄 摘要(原文)
We present a stereo-matching method for depth estimation from high-resolution images using visual hulls as priors, and a memory-efficient technique for the correlation computation. Our method uses object masks extracted from supplementary views of the scene to guide the disparity estimation, effectively reducing the search space for matches. This approach is specifically tailored to stereo rigs in volumetric capture systems, where an accurate depth plays a key role in the downstream reconstruction task. To enable training and regression at high resolutions targeted by recent systems, our approach extends a sparse correlation computation into a hybrid sparse-dense scheme suitable for application in leading recurrent network architectures. We evaluate the performance-efficiency trade-off of our method compared to state-of-the-art methods, and demonstrate the efficacy of the visual hull guidance. In addition, we propose a training scheme for a further reduction of memory requirements during optimization, facilitating training on high-resolution data.