NeB-SLAM: Neural Blocks-based Salable RGB-D SLAM for Unknown Scenes
作者: Lizhi Bai, Chunqi Tian, Jun Yang, Siyu Zhang, Weijian Liang
分类: cs.CV, cs.GR, cs.RO
发布日期: 2024-05-24 (更新: 2024-09-07)
💡 一句话要点
NeB-SLAM:基于神经块的可扩展RGB-D SLAM,用于未知场景
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: SLAM 神经隐式表示 RGB-D 未知环境 三维重建
📋 核心要点
- 现有基于神经隐式表示的SLAM方法需要预知场景大小,这限制了其在未知环境中的应用。
- NeB-SLAM采用分而治之的策略,将场景划分为多个固定大小的神经块子地图,并自适应地增长地图。
- 实验结果表明,NeB-SLAM在未知环境中实现了具有竞争力的建图和跟踪性能。
📝 摘要(中文)
神经隐式表示最近在视觉同步定位与建图(SLAM)领域展现出巨大的潜力,这归功于其固有的优势,包括低存储开销和表示连续性。然而,这些方法需要场景的大小作为输入,这对于未知场景是不切实际的。因此,我们提出了NeB-SLAM,一种基于神经块的可扩展RGB-D SLAM,用于未知场景。具体来说,我们首先提出了一种分而治之的建图策略,将整个未知场景表示为一组子地图。这些子地图是一组固定大小的神经块。然后,我们引入了一种自适应地图增长策略,以在相机跟踪期间实现神经块的自适应分配,并逐步覆盖整个未知场景。最后,在各种数据集上的广泛评估表明,我们的方法在针对未知环境的建图和跟踪方面都具有竞争力。
🔬 方法详解
问题定义:现有基于神经隐式表示的SLAM方法通常需要预先知道场景的大小,这使得它们难以应用于真实的未知环境。这些方法无法有效地处理动态增长的场景,并且在大型场景中可能面临计算资源瓶颈。因此,如何构建一个能够处理未知大小场景,并且具有良好可扩展性的SLAM系统是一个关键问题。
核心思路:NeB-SLAM的核心思路是将整个未知场景分解为一组固定大小的神经块(Neural Blocks),每个神经块代表场景的一个局部区域。通过这种分而治之的策略,系统可以逐步探索和构建整个场景,而无需预先知道场景的全局大小。此外,系统采用自适应地图增长策略,根据相机跟踪的结果动态地分配和扩展神经块,从而实现对未知场景的有效覆盖。
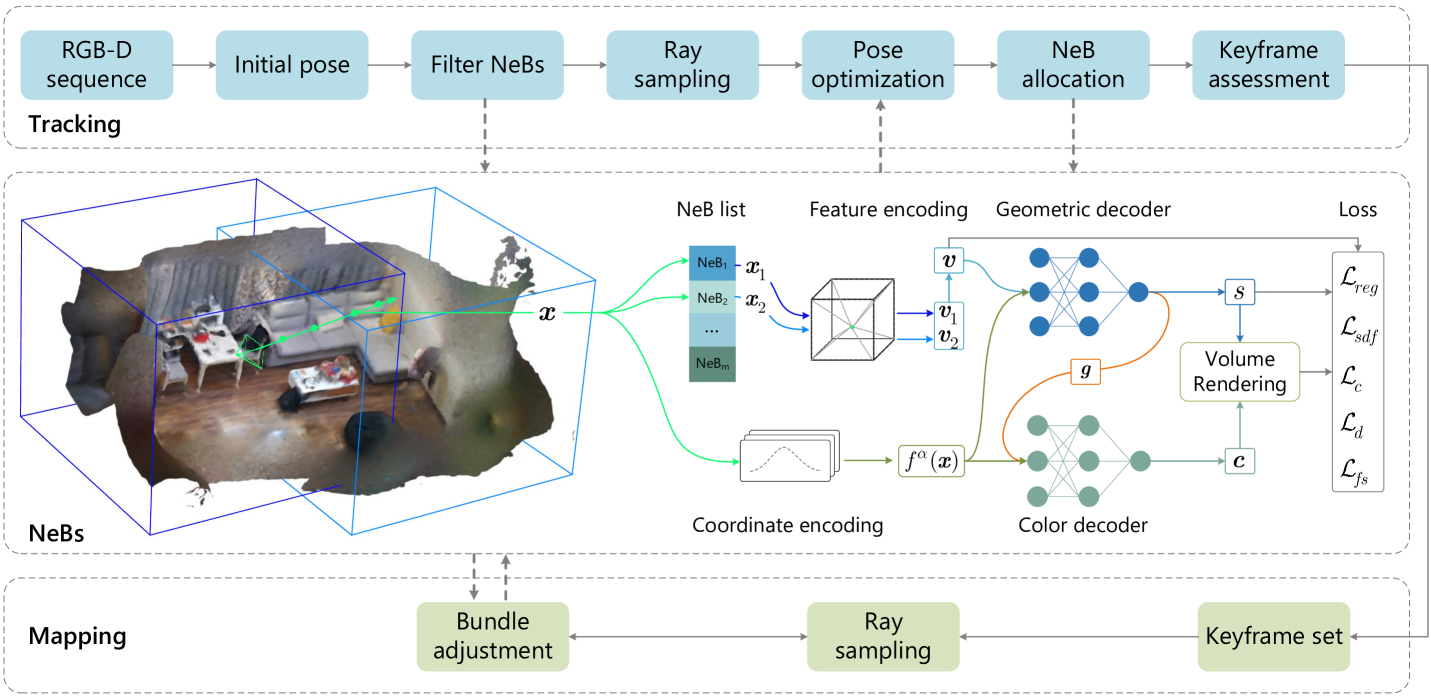
技术框架:NeB-SLAM的整体框架主要包含以下几个模块:1) 相机跟踪模块:利用RGB-D图像进行相机位姿估计。2) 神经块管理模块:负责神经块的创建、分配和更新。3) 地图增长模块:根据相机位姿和场景探索情况,自适应地添加新的神经块。4) 渲染模块:利用神经隐式表示渲染场景。整个流程是:相机跟踪模块估计相机位姿,然后神经块管理模块根据相机位姿和地图覆盖情况,决定是否需要添加新的神经块,最后利用神经隐式表示进行场景渲染和优化。
关键创新:NeB-SLAM的关键创新在于其基于神经块的分而治之的建图策略和自适应地图增长策略。与传统的全局神经隐式表示方法相比,NeB-SLAM无需预先知道场景大小,并且具有更好的可扩展性。自适应地图增长策略能够有效地利用计算资源,避免在未探索区域进行不必要的计算。
关键设计:神经块的大小是一个关键参数,它决定了局部表示的精度和计算复杂度。自适应地图增长策略通过监控相机位姿和神经块的覆盖范围,动态地调整神经块的分配。损失函数通常包括光度损失和几何损失,用于优化神经隐式表示。网络结构方面,可以使用MLP(多层感知机)来表示每个神经块内的场景几何和外观信息。
🖼️ 关键图片


📊 实验亮点
论文在多个数据集上进行了实验,结果表明NeB-SLAM在未知环境中实现了具有竞争力的建图和跟踪性能。与现有的基于神经隐式表示的SLAM方法相比,NeB-SLAM在未知场景中表现出更好的鲁棒性和可扩展性。具体的性能数据(例如,相对位姿误差、建图精度等)需要在论文中查找。
🎯 应用场景
NeB-SLAM在机器人导航、增强现实、虚拟现实等领域具有广泛的应用前景。它可以用于构建未知环境的三维地图,为机器人提供导航和避障能力。在增强现实和虚拟现实应用中,NeB-SLAM可以用于实时重建场景,提供更逼真的用户体验。此外,该方法还可以应用于文物保护、城市建模等领域。
📄 摘要(原文)
Neural implicit representations have recently demonstrated considerable potential in the field of visual simultaneous localization and mapping (SLAM). This is due to their inherent advantages, including low storage overhead and representation continuity. However, these methods necessitate the size of the scene as input, which is impractical for unknown scenes. Consequently, we propose NeB-SLAM, a neural block-based scalable RGB-D SLAM for unknown scenes. Specifically, we first propose a divide-and-conquer mapping strategy that represents the entire unknown scene as a set of sub-maps. These sub-maps are a set of neural blocks of fixed size. Then, we introduce an adaptive map growth strategy to achieve adaptive allocation of neural blocks during camera tracking and gradually cover the whole unknown scene. Finally, extensive evaluations on various datasets demonstrate that our method is competitive in both mapping and tracking when targeting unknown environments.