OverlapMamba: Novel Shift State Space Model for LiDAR-based Place Recognition
作者: Qiuchi Xiang, Jintao Cheng, Jiehao Luo, Jin Wu, Rui Fan, Xieyuanli Chen, Xiaoyu Tang
分类: cs.CV, cs.AI
发布日期: 2024-05-13
💡 一句话要点
提出OverlapMamba,一种基于LiDAR的新型移位状态空间模型,用于解决地点识别问题。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: LiDAR地点识别 状态空间模型 Mamba 序列建模 移位操作
📋 核心要点
- 现有基于点云的地点识别方法计算复杂度高,难以满足实时性需求,且对视角变化敏感。
- OverlapMamba通过将距离视图表示为序列,并利用移位状态空间模型压缩视觉信息,从而提高效率和鲁棒性。
- 实验结果表明,OverlapMamba在多个数据集上优于传统方法,且在时间和速度上具有显著优势,具备实时性。
📝 摘要(中文)
地点识别是使自主系统能够实现独立决策和安全运行的基础。它在SLAM中的闭环检测和全局定位等任务中也至关重要。以往的方法通常使用原始点云作为输入,并采用基于深度学习的LiDAR地点识别(LPR)方法,这些方法使用不同的点云图像输入以及卷积神经网络(CNN)或Transformer架构。然而,最近提出的Mamba深度学习模型与状态空间模型(SSM)相结合,在长序列建模方面具有巨大的潜力。因此,我们开发了OverlapMamba,一种用于地点识别的新型网络,它将输入距离视图(RV)表示为序列。我们以一种新颖的方式,采用随机重建方法来构建移位状态空间模型,从而压缩视觉表示。在三个不同的公共数据集上进行评估,我们的方法有效地检测闭环,即使从不同的方向遍历先前访问过的位置,也显示出鲁棒性。依靠原始距离视图输入,它在时间复杂度和速度方面优于典型的LiDAR和多视图组合方法,表明了强大的地点识别能力和实时效率。
🔬 方法详解
问题定义:论文旨在解决LiDAR地点识别问题,即在不同视角和环境下准确识别已访问过的地点。现有方法,如基于点云或卷积神经网络的方法,通常计算复杂度高,难以满足实时性要求,并且对视角变化较为敏感。
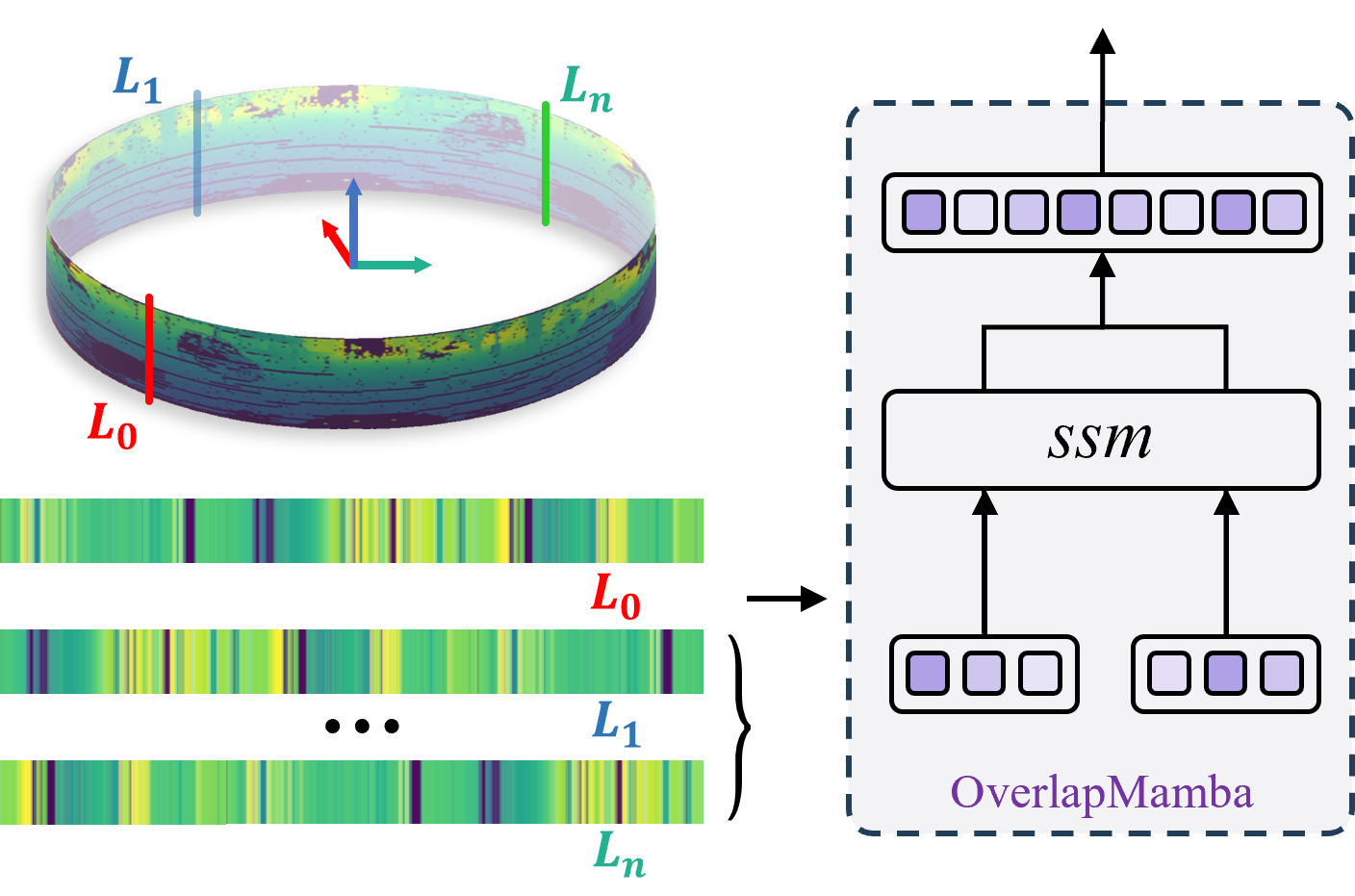
核心思路:论文的核心思路是将LiDAR数据表示为距离视图序列,并利用Mamba模型(一种基于状态空间模型的序列建模方法)进行特征提取和地点识别。通过移位操作和随机重建,压缩视觉表示,提高模型的鲁棒性和效率。
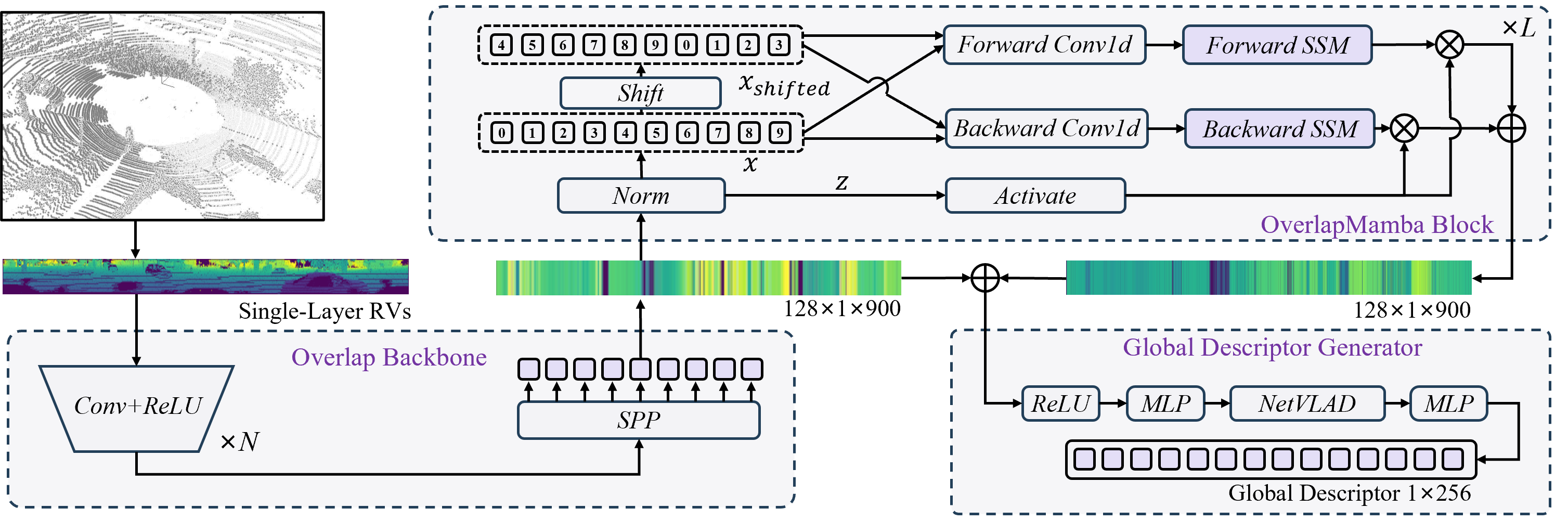
技术框架:OverlapMamba的整体框架包括以下几个主要步骤:1) 将LiDAR点云转换为距离视图(Range View, RV);2) 将RV表示为序列输入到OverlapMamba网络;3) OverlapMamba网络利用移位状态空间模型进行特征提取和压缩;4) 通过相似性度量(例如余弦相似度)比较不同地点的特征向量,从而进行地点识别。
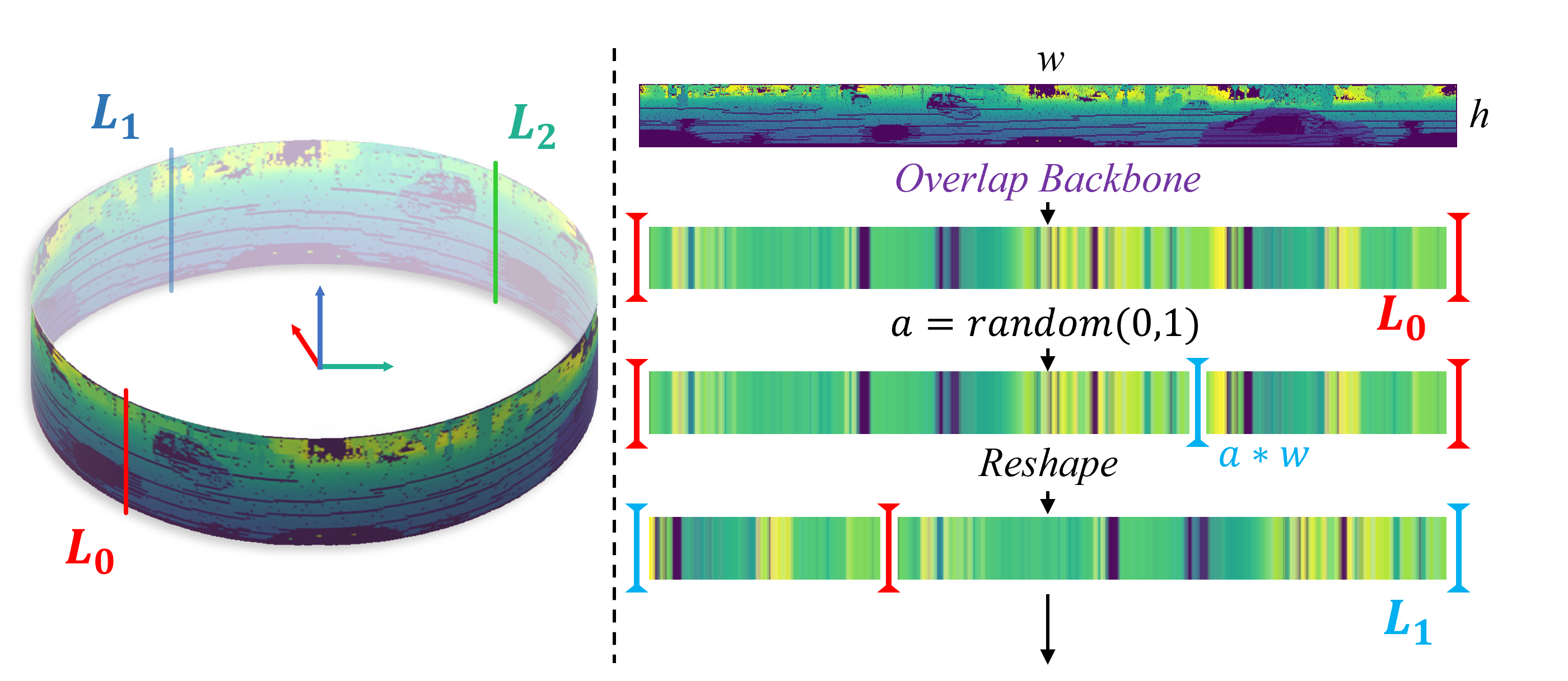
关键创新:OverlapMamba的关键创新在于:1) 将Mamba模型引入LiDAR地点识别领域,利用其在长序列建模方面的优势;2) 提出了一种基于随机重建的移位状态空间模型,有效地压缩了视觉表示,提高了模型的鲁棒性和效率;3) 直接使用原始距离视图作为输入,避免了复杂的预处理步骤。
关键设计:OverlapMamba的关键设计包括:1) 移位操作:通过在序列上进行移位,增加模型对视角变化的鲁棒性;2) 随机重建:通过随机掩码和重建损失,迫使模型学习更鲁棒的特征表示;3) Mamba块的参数设置:包括状态维度、选择机制等,需要根据具体数据集进行调整;4) 损失函数:主要采用对比损失或三元组损失,用于训练模型区分不同地点的特征向量。
🖼️ 关键图片
📊 实验亮点
OverlapMamba在三个公开数据集上进行了评估,实验结果表明,该方法在地点识别精度和效率方面均优于现有方法。具体而言,OverlapMamba在闭环检测任务中取得了更高的召回率和准确率,并且在时间复杂度和速度方面具有显著优势,能够实现实时地点识别。
🎯 应用场景
OverlapMamba可应用于自动驾驶、机器人导航、SLAM等领域,为自主系统提供准确可靠的地点识别能力。该方法能够提高系统在复杂环境下的定位精度和鲁棒性,例如在光照变化、遮挡和视角变化等情况下。此外,OverlapMamba的实时性优势使其能够满足对响应速度有较高要求的应用场景。
📄 摘要(原文)
Place recognition is the foundation for enabling autonomous systems to achieve independent decision-making and safe operations. It is also crucial in tasks such as loop closure detection and global localization within SLAM. Previous methods utilize mundane point cloud representations as input and deep learning-based LiDAR-based Place Recognition (LPR) approaches employing different point cloud image inputs with convolutional neural networks (CNNs) or transformer architectures. However, the recently proposed Mamba deep learning model, combined with state space models (SSMs), holds great potential for long sequence modeling. Therefore, we developed OverlapMamba, a novel network for place recognition, which represents input range views (RVs) as sequences. In a novel way, we employ a stochastic reconstruction approach to build shift state space models, compressing the visual representation. Evaluated on three different public datasets, our method effectively detects loop closures, showing robustness even when traversing previously visited locations from different directions. Relying on raw range view inputs, it outperforms typical LiDAR and multi-view combination methods in time complexity and speed, indicating strong place recognition capabilities and real-time efficiency.