Hand-Object Interaction Controller (HOIC): Deep Reinforcement Learning for Reconstructing Interactions with Physics
作者: Haoyu Hu, Xinyu Yi, Zhe Cao, Jun-Hai Yong, Feng Xu
分类: cs.CV, cs.GR
发布日期: 2024-05-04
备注: SIGGRAPH 2024 Conference Track
🔗 代码/项目: GITHUB
💡 一句话要点
提出HOIC,利用深度强化学习和物理引擎重建手-物交互
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 手-物交互 深度强化学习 物理引擎 对象补偿控制 表面接触模型
📋 核心要点
- 现有方法难以在手-物交互重建中有效利用物理信息,导致重建结果不真实,缺乏物理合理性。
- 论文提出对象补偿控制,直接控制物体运动,并利用补偿力和力矩将点接触模型升级为表面接触模型。
- 实验表明,该方法在重建精度和物理正确性方面均有提升,且无需人工设计的物理规则。
📝 摘要(中文)
本文提出了一种新颖的深度强化学习方法,用于利用单目RGBD相机忠实地重建手部操纵物体的交互运动。该方法的核心在于对象补偿控制,它建立了直接的对象控制,从而使网络训练更加稳定。同时,通过利用补偿力和力矩,我们将简单的点接触模型无缝升级为更符合物理规律的表面接触模型,进一步提高了重建精度和物理正确性。实验表明,在不涉及任何启发式物理规则的情况下,该方法仍然成功地将物理学融入到手-物交互的重建中,而这些交互是深度强化学习难以模仿的复杂运动。
🔬 方法详解
问题定义:手部与物体的交互是日常活动中重要的运动模式。现有的方法在利用单目RGBD相机重建这类交互时,难以保证重建结果的物理合理性,例如物体穿透、不自然的运动等。这是因为深度强化学习在处理复杂运动时,难以有效利用物理信息,导致重建结果不真实。
核心思路:论文的核心思路是通过引入对象补偿控制,直接控制物体的运动,从而使网络训练更加稳定。同时,利用补偿力和力矩,将简单的点接触模型升级为更符合物理规律的表面接触模型,从而在重建过程中融入物理信息,提高重建精度和物理正确性。
技术框架:HOIC的整体框架基于深度强化学习。主要包含以下模块:1) 状态表示模块:从RGBD图像中提取手部和物体的状态信息。2) 动作控制模块:根据状态信息,输出手部的动作,并通过对象补偿控制直接作用于物体。3) 物理引擎:模拟手部和物体的交互过程,并计算补偿力和力矩。4) 奖励函数:根据重建精度和物理合理性,对动作进行奖励或惩罚。
关键创新:该方法最重要的创新点在于对象补偿控制和表面接触模型的引入。对象补偿控制通过直接控制物体运动,简化了强化学习的探索空间,提高了训练的稳定性。表面接触模型则通过利用补偿力和力矩,更准确地模拟了手部和物体的交互过程,从而提高了重建结果的物理合理性。
关键设计:奖励函数的设计是关键。论文综合考虑了重建精度(例如手部和物体的位置误差)和物理合理性(例如补偿力和力矩的大小)。网络结构方面,论文采用了常用的Actor-Critic网络结构,并针对手-物交互的特点进行了优化。具体的参数设置和网络结构细节在论文中有详细描述。
🖼️ 关键图片


📊 实验亮点
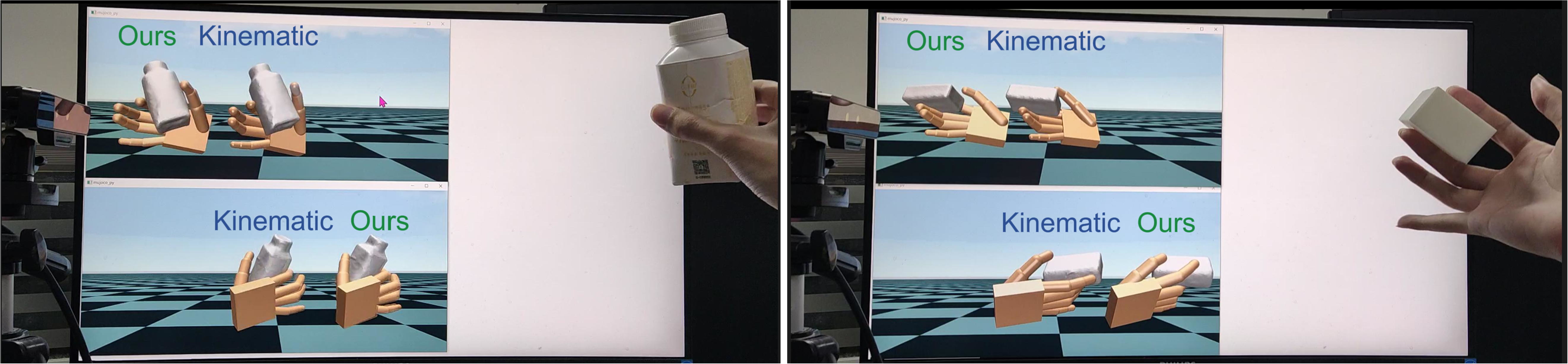
实验结果表明,HOIC在手-物交互重建的精度和物理合理性方面均优于现有方法。具体来说,HOIC能够生成更平滑、更自然的运动轨迹,并且能够避免物体穿透等不合理的现象。此外,HOIC在不同的手-物交互场景中均表现出良好的泛化能力。
🎯 应用场景
该研究成果可应用于人机交互、虚拟现实、机器人控制等领域。例如,可以用于创建更逼真的虚拟环境,使用户能够与虚拟物体进行自然的交互。此外,该方法还可以用于训练机器人进行复杂的手部操作,例如装配、抓取等。
📄 摘要(原文)
Hand manipulating objects is an important interaction motion in our daily activities. We faithfully reconstruct this motion with a single RGBD camera by a novel deep reinforcement learning method to leverage physics. Firstly, we propose object compensation control which establishes direct object control to make the network training more stable. Meanwhile, by leveraging the compensation force and torque, we seamlessly upgrade the simple point contact model to a more physical-plausible surface contact model, further improving the reconstruction accuracy and physical correctness. Experiments indicate that without involving any heuristic physical rules, this work still successfully involves physics in the reconstruction of hand-object interactions which are complex motions hard to imitate with deep reinforcement learning. Our code and data are available at https://github.com/hu-hy17/HOIC.