Precise and Robust Sidewalk Detection: Leveraging Ensemble Learning to Surpass LLM Limitations in Urban Environments
作者: Ibne Farabi Shihab, Sudesh Ramesh Bhagat, Anuj Sharma
分类: cs.CV, cs.AI
发布日期: 2024-04-02 (更新: 2025-01-23)
💡 一句话要点
提出集成学习模型以提升城市环境中的人行道检测精度
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 人行道检测 集成学习 城市环境 机器学习 鲁棒性 交通安全 数据集评估
📋 核心要点
- 现有的人行道检测方法在复杂城市环境中表现不佳,尤其在噪声干扰下性能显著下降。
- 本研究提出了一种集成学习模型,通过结合多种模型的优势,提升人行道检测的准确性和鲁棒性。
- 实验结果显示,集成模型在多个数据集上均优于单一模型,且在噪声条件下性能保持稳定,显示出良好的实用性。
📝 摘要(中文)
本研究旨在比较一种强大的集成模型与最先进的ONE-PEACE大型语言模型(LLM)在准确检测人行道方面的有效性。准确的人行道检测对于提高道路安全和城市规划至关重要。研究在Cityscapes、Ade20k和波士顿数据集上评估了模型的性能。结果表明,集成模型在理想条件下的平均交并比(mIOU)得分分别为93.1%、90.3%和90.6%,优于单个模型。此外,集成模型在盐和胡椒噪声及斑点噪声等挑战性条件下仍保持一致的性能,仅观察到效率的逐渐下降。相对而言,ONE-PEACE LLM在理想场景下表现稍好,但在噪声条件下性能显著下降。这些发现展示了集成模型的鲁棒性和可靠性,为改善与道路安全和路缘空间管理相关的城市基础设施提供了重要支持。
🔬 方法详解
问题定义:本论文旨在解决城市环境中人行道检测的准确性问题,现有方法在噪声干扰和复杂场景下表现不佳,导致检测效果不理想。
核心思路:论文提出了一种集成学习模型,通过结合多个单一模型的预测结果,以提高整体检测精度和鲁棒性。这样的设计可以有效利用不同模型在特定条件下的优势。
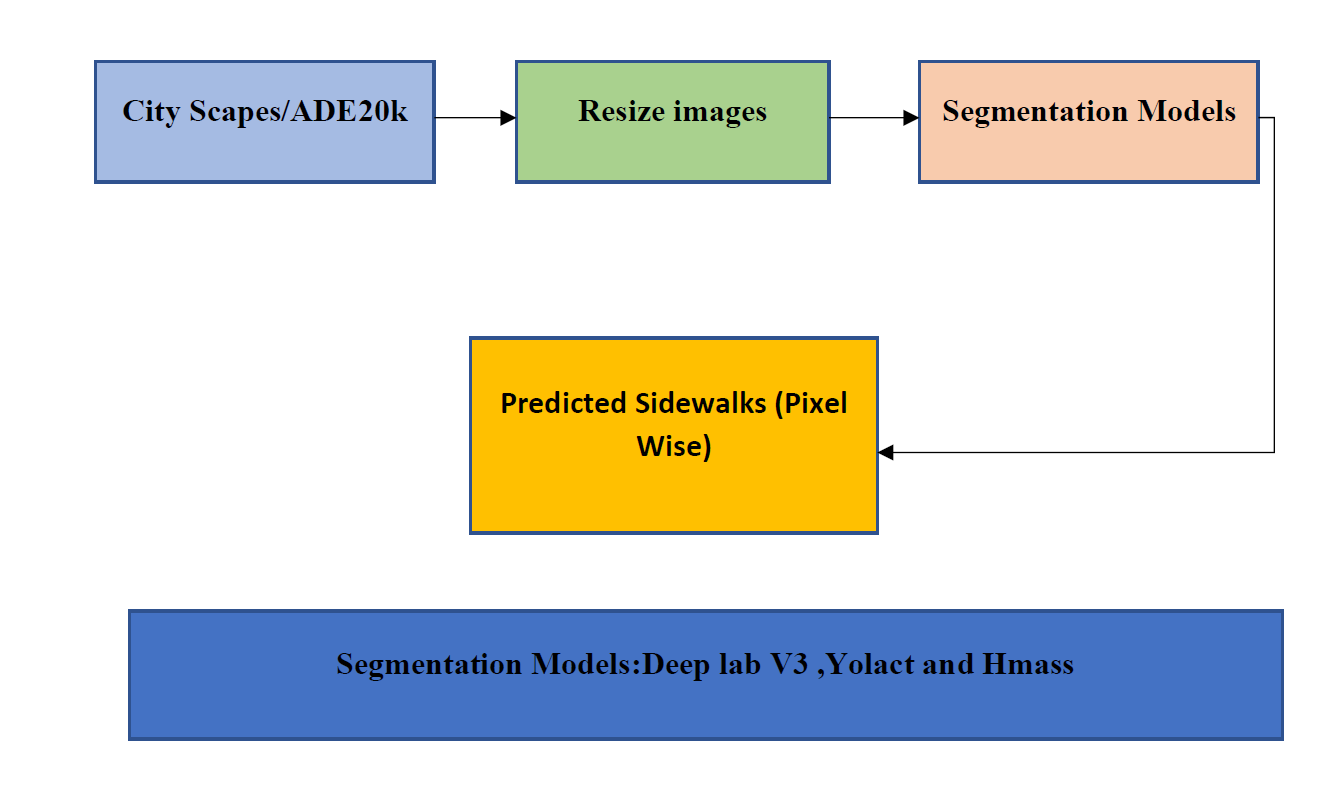
技术框架:整体架构包括数据预处理、模型训练、集成策略和性能评估四个主要模块。数据预处理阶段负责清洗和增强输入数据,模型训练阶段则使用多种基础模型进行训练,集成策略通过加权平均或投票机制整合各模型的输出,最后进行性能评估。
关键创新:本研究的主要创新在于提出了一种有效的集成学习策略,能够在噪声条件下保持高性能,与现有方法相比,显著提升了鲁棒性和准确性。
关键设计:在模型设计中,采用了多种损失函数以适应不同的训练目标,并通过超参数调优来优化模型性能,确保在不同数据集上均能取得良好效果。
🖼️ 关键图片


📊 实验亮点
实验结果显示,集成模型在Cityscapes、Ade20k和波士顿数据集上的平均交并比(mIOU)分别达到了93.1%、90.3%和90.6%,在噪声条件下性能仅有轻微下降,显示出优越的鲁棒性。相比之下,ONE-PEACE LLM在理想条件下表现稍好,但在噪声环境中性能显著下降,突显了集成模型的优势。
🎯 应用场景
该研究的成果在城市规划、智能交通系统和自动驾驶等领域具有广泛的应用潜力。通过提高人行道检测的准确性,可以有效改善城市交通安全,优化行人通行路线,进而提升整体城市健康和移动性。未来,该技术有望与其他智能城市基础设施相结合,推动城市智能化进程。
📄 摘要(原文)
This study aims to compare the effectiveness of a robust ensemble model with the state-of-the-art ONE-PEACE Large Language Model (LLM) for accurate detection of sidewalks. Accurate sidewalk detection is crucial in improving road safety and urban planning. The study evaluated the model's performance on Cityscapes, Ade20k, and the Boston Dataset. The results showed that the ensemble model performed better than the individual models, achieving mean Intersection Over Union (mIOU) scores of 93.1\%, 90.3\%, and 90.6\% on these datasets under ideal conditions. Additionally, the ensemble model maintained a consistent level of performance even in challenging conditions such as Salt-and-Pepper and Speckle noise, with only a gradual decrease in efficiency observed. On the other hand, the ONE-PEACE LLM performed slightly better than the ensemble model in ideal scenarios but experienced a significant decline in performance under noisy conditions. These findings demonstrate the robustness and reliability of the ensemble model, making it a valuable asset for improving urban infrastructure related to road safety and curb space management. This study contributes positively to the broader context of urban health and mobility.