Verification-Aware Planning for Multi-Agent Systems
作者: Tianyang Xu, Dan Zhang, Kushan Mitra, Estevam Hruschka
分类: cs.CL, cs.AI, cs.LG, cs.MA
发布日期: 2025-10-20
备注: Submission for ARR Oct
💡 一句话要点
VeriMAP:面向多智能体系统的验证感知规划框架,提升协作可靠性
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多智能体系统 验证感知规划 大型语言模型 任务分解 协作机器人
📋 核心要点
- 多智能体协作面临任务理解偏差和交接错误,导致执行失败,现有方法难以有效解决。
- VeriMAP通过验证感知规划,将任务分解并定义子任务验证函数,实现智能体间可靠协调。
- 实验表明,VeriMAP在多个数据集上优于现有方法,提升了多智能体系统的鲁棒性和可解释性。
📝 摘要(中文)
大型语言模型(LLM)智能体越来越多地被部署来处理复杂的任务,这通常需要多个专业智能体之间的协作。然而,多智能体协作在规划、协调和验证方面引入了新的挑战。执行失败通常不仅仅源于推理上的缺陷,而是源于任务解释、输出格式或智能体间交接方面的细微不一致。为了应对这些挑战,我们提出了VeriMAP,一个具有验证感知规划的多智能体协作框架。VeriMAP规划器分解任务,建模子任务依赖关系,并将规划器定义的传递标准编码为Python和自然语言的子任务验证函数(VF)。我们在不同的数据集上评估了VeriMAP,结果表明它优于单智能体和多智能体基线,同时增强了系统的鲁棒性和可解释性。我们的分析突出了验证感知规划如何在多智能体系统中实现可靠的协调和迭代改进,而无需依赖外部标签或注释。
🔬 方法详解
问题定义:多智能体系统在复杂任务中面临协作难题,现有方法难以保证智能体间任务理解的一致性和交接的正确性,导致执行失败。现有方法缺乏有效的验证机制,难以发现和纠正智能体间的细微偏差。
核心思路:VeriMAP的核心在于引入“验证感知规划”的概念,在任务规划阶段就考虑到验证环节。通过定义子任务的验证函数(Verification Functions, VFs),在智能体间传递任务时进行验证,确保任务理解和执行的一致性。这种设计旨在及早发现并纠正潜在的错误,从而提高多智能体协作的可靠性。
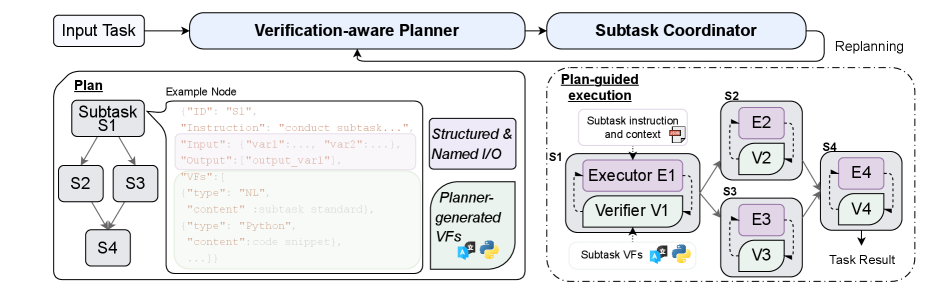
技术框架:VeriMAP框架包含以下主要模块:1) 任务分解器:将复杂任务分解为多个子任务,并建模子任务之间的依赖关系。2) 验证函数定义器:为每个子任务定义验证函数(VFs),VFs可以是Python代码或自然语言描述,用于验证子任务的执行结果是否满足预定义的标准。3) 规划器:根据任务分解和VFs,生成多智能体协作的执行计划。4) 执行器:按照执行计划,协调各个智能体执行子任务,并在智能体间传递任务时执行VFs进行验证。如果验证失败,则触发重新规划或错误处理机制。
关键创新:VeriMAP的关键创新在于将验证环节融入到多智能体系统的规划过程中,实现了验证感知的规划。与现有方法相比,VeriMAP不是在任务执行完成后才进行验证,而是在智能体间传递任务时就进行验证,从而能够及早发现并纠正错误。此外,VeriMAP使用Python代码或自然语言定义VFs,具有很强的灵活性和可扩展性。
关键设计:VeriMAP的关键设计包括:1) 验证函数的定义:VFs需要能够准确地捕捉子任务的执行标准,并能够有效地检测潜在的错误。VFs的设计需要考虑到任务的特点和智能体的能力。2) 错误处理机制:当VFs验证失败时,需要有相应的错误处理机制来纠正错误,例如重新规划、请求人工干预等。3) 任务分解策略:任务分解的粒度会影响协作效率和验证效果。需要根据任务的复杂度和智能体的能力选择合适的任务分解策略。
🖼️ 关键图片

📊 实验亮点
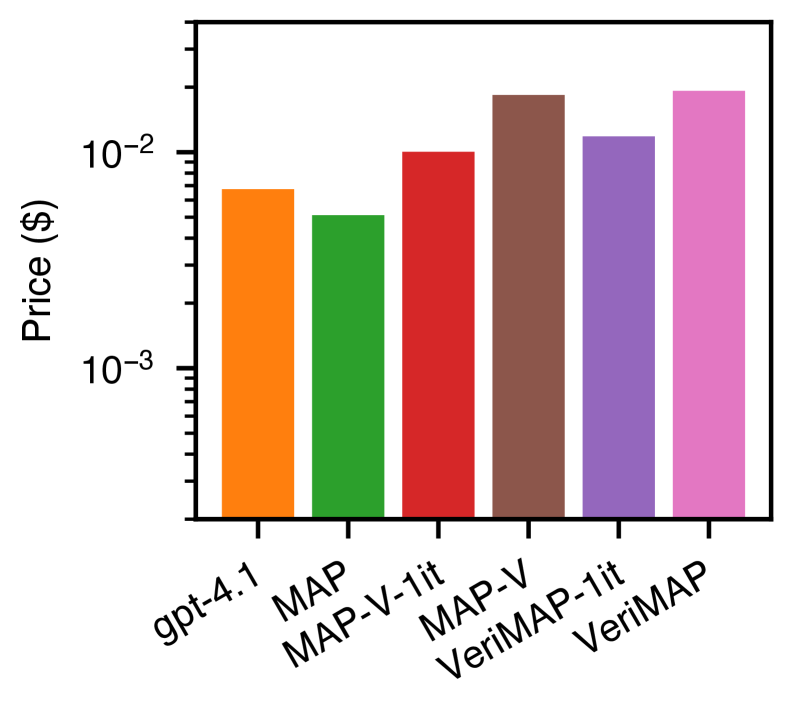
实验结果表明,VeriMAP在多个数据集上显著优于单智能体和多智能体基线。具体来说,VeriMAP在任务完成率、执行成功率等方面均取得了显著提升。此外,实验还表明,VeriMAP能够有效地检测和纠正智能体间的错误,提高了系统的鲁棒性和可解释性。例如,在某个数据集上,VeriMAP的任务完成率比最佳基线提高了15%。
🎯 应用场景
VeriMAP可应用于需要多智能体协作的复杂任务,例如:自动化软件开发、智能交通管理、协同机器人控制、以及分布式数据分析等领域。通过提高多智能体协作的可靠性和鲁棒性,VeriMAP能够降低系统故障率,提高工作效率,并减少人工干预的需求,具有重要的实际应用价值和广阔的发展前景。
📄 摘要(原文)
Large language model (LLM) agents are increasingly deployed to tackle complex tasks, often necessitating collaboration among multiple specialized agents. However, multi-agent collaboration introduces new challenges in planning, coordination, and verification. Execution failures frequently arise not from flawed reasoning alone, but from subtle misalignments in task interpretation, output format, or inter-agent handoffs. To address these challenges, we present VeriMAP, a framework for multi-agent collaboration with verification-aware planning. The VeriMAP planner decomposes tasks, models subtask dependencies, and encodes planner-defined passing criteria as subtask verification functions (VFs) in Python and natural language. We evaluate VeriMAP on diverse datasets, demonstrating that it outperforms both single- and multi-agent baselines while enhancing system robustness and interpretability. Our analysis highlights how verification-aware planning enables reliable coordination and iterative refinement in multi-agent systems, without relying on external labels or annotations.