SAUP: Situation Awareness Uncertainty Propagation on LLM Agent
作者: Qiwei Zhao, Xujiang Zhao, Yanchi Liu, Wei Cheng, Yiyou Sun, Mika Oishi, Takao Osaki, Katsushi Matsuda, Huaxiu Yao, Haifeng Chen
分类: cs.CL, cs.LG
发布日期: 2024-12-02
💡 一句话要点
提出SAUP框架,用于LLM Agent多步推理中情境感知的不确定性传播
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: LLM Agent 不确定性估计 情境感知 多步推理 风险评估
📋 核心要点
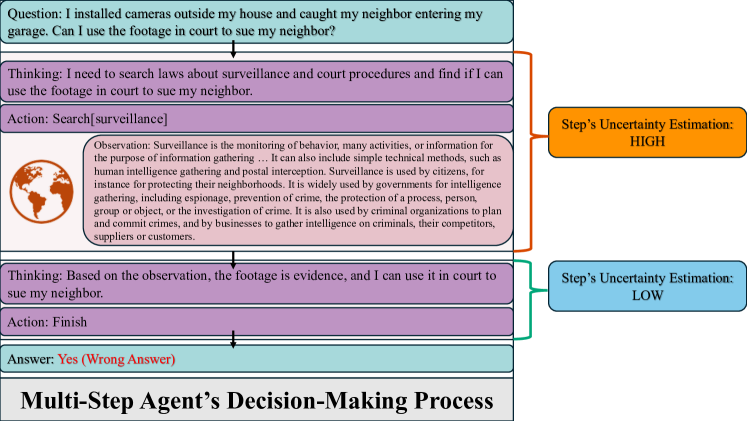
- 现有不确定性估计方法忽略了LLM Agent多步推理中累积的不确定性,以及Agent与环境的动态交互。
- SAUP框架通过为每一步的不确定性分配情境权重,从而在不确定性传播中融入情境感知。
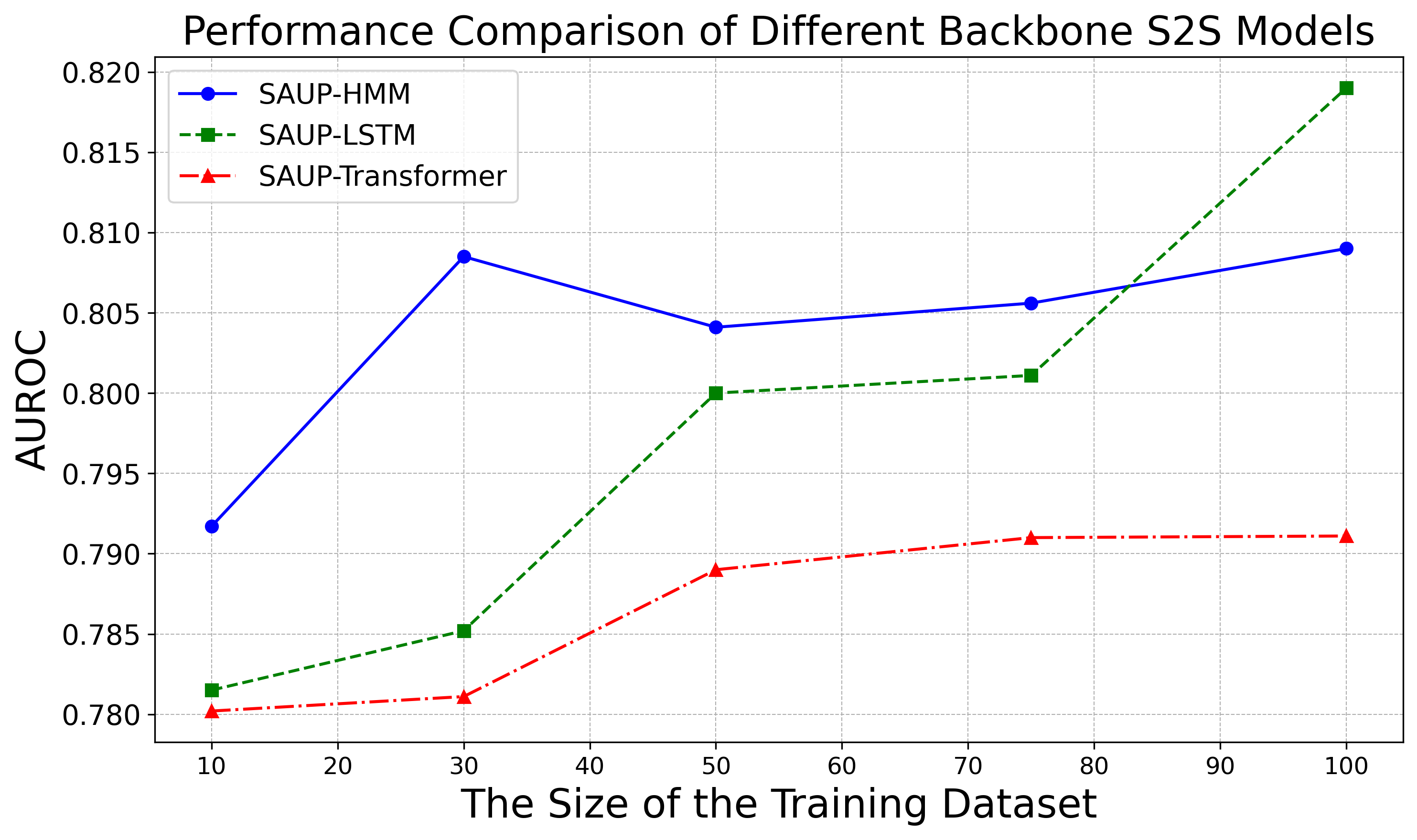
- 实验结果表明,SAUP在AUROC指标上相比现有方法提升高达20%,显著提升了不确定性估计的准确性。
📝 摘要(中文)
本文提出了一种名为SAUP(Situation Awareness Uncertainty Propagation)的新框架,用于在基于LLM的Agent推理过程中传播不确定性。现有的不确定性估计方法主要关注最终步骤的输出,忽略了多步决策过程中的累积不确定性以及Agent与其环境之间的动态交互。SAUP通过在传播过程中为每个步骤的不确定性分配情境权重,从而整合情境感知。该方法与各种单步不确定性估计技术兼容,并提供全面而准确的不确定性度量。在基准数据集上的大量实验表明,SAUP显著优于现有的最先进方法,AUROC指标提升高达20%。
🔬 方法详解
问题定义:现有的大语言模型(LLM)Agent在多步决策过程中,由于每一步推理都可能引入误差,导致最终输出的可靠性难以保证。现有的不确定性估计方法通常只关注最终输出,忽略了中间步骤的误差累积,以及Agent与环境交互带来的不确定性变化。因此,如何准确估计LLM Agent在多步推理过程中的不确定性,是一个亟待解决的问题。
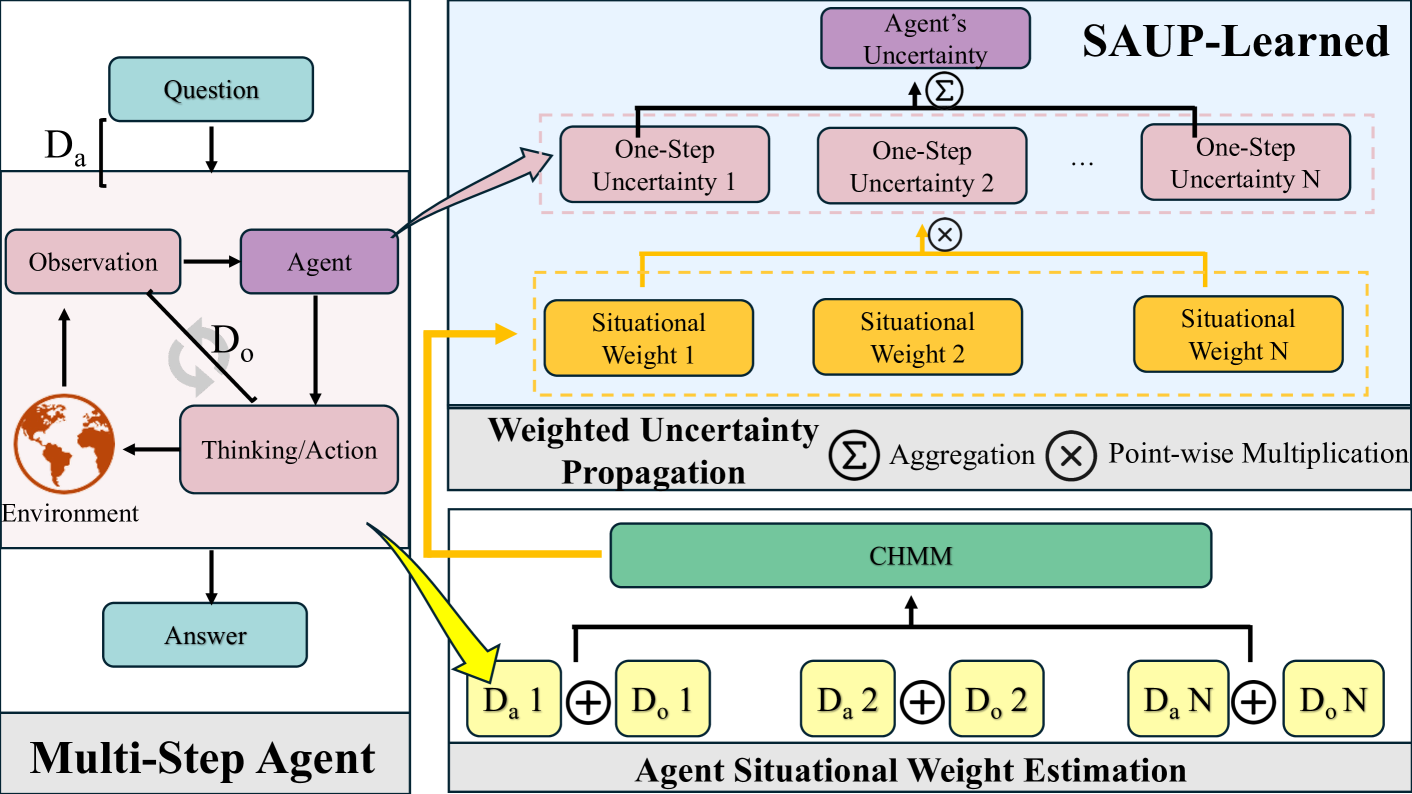
核心思路:SAUP的核心思路是在不确定性传播的过程中,引入情境感知。这意味着,在每一步推理中,不仅要考虑该步骤本身的不确定性,还要考虑当前情境对不确定性的影响。通过为每一步的不确定性分配情境权重,可以更准确地反映整体的不确定性水平。
技术框架:SAUP框架包含以下几个主要阶段:1) 单步不确定性估计:使用现有的方法(如Dropout、Deep Ensemble等)估计每一步推理的不确定性。2) 情境权重分配:根据当前情境,为每一步的不确定性分配权重。情境权重可以基于Agent的状态、环境信息等进行计算。3) 不确定性传播:将每一步的不确定性及其情境权重进行传播,得到最终的不确定性估计。传播方法可以是加权平均、最大值选择等。
关键创新:SAUP的关键创新在于将情境感知融入到不确定性传播的过程中。与现有方法相比,SAUP不仅考虑了每一步推理的不确定性,还考虑了情境对不确定性的影响,从而更准确地估计了整体的不确定性水平。此外,SAUP框架具有良好的通用性,可以与各种单步不确定性估计方法相结合。
关键设计:情境权重的计算是SAUP的关键设计之一。论文中可能使用了某种函数或模型来计算情境权重,该函数或模型的输入包括Agent的状态、环境信息等,输出为每一步推理的情境权重。具体的函数形式和参数设置未知,可能需要参考论文原文。
🖼️ 关键图片
📊 实验亮点
实验结果表明,SAUP在多个基准数据集上显著优于现有的最先进方法。具体来说,SAUP在AUROC指标上取得了高达20%的提升。这表明SAUP能够更准确地估计LLM Agent在多步推理过程中的不确定性,从而提高决策的可靠性。
🎯 应用场景
SAUP框架可应用于各种需要LLM Agent进行多步决策的场景,例如机器人导航、自动驾驶、智能客服等。通过准确估计Agent的不确定性,可以提高决策的可靠性和安全性,避免因错误决策带来的风险。此外,SAUP还可以用于评估不同Agent的性能,选择更可靠的Agent。
📄 摘要(原文)
Large language models (LLMs) integrated into multistep agent systems enable complex decision-making processes across various applications. However, their outputs often lack reliability, making uncertainty estimation crucial. Existing uncertainty estimation methods primarily focus on final-step outputs, which fail to account for cumulative uncertainty over the multistep decision-making process and the dynamic interactions between agents and their environments. To address these limitations, we propose SAUP (Situation Awareness Uncertainty Propagation), a novel framework that propagates uncertainty through each step of an LLM-based agent's reasoning process. SAUP incorporates situational awareness by assigning situational weights to each step's uncertainty during the propagation. Our method, compatible with various one-step uncertainty estimation techniques, provides a comprehensive and accurate uncertainty measure. Extensive experiments on benchmark datasets demonstrate that SAUP significantly outperforms existing state-of-the-art methods, achieving up to 20% improvement in AUROC.