Interactive and Expressive Code-Augmented Planning with Large Language Models
作者: Anthony Z. Liu, Xinhe Wang, Jacob Sansom, Yao Fu, Jongwook Choi, Sungryull Sohn, Jaekyeom Kim, Honglak Lee
分类: cs.CL, cs.LG
发布日期: 2024-11-21
💡 一句话要点
提出REPL-Plan,利用代码增强的大语言模型进行交互式和表达性规划
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 大语言模型 规划 代码生成 交互式学习 Read-Eval-Print Loop
📋 核心要点
- 现有基于代码的LLM规划方法在处理模糊数据和纠正错误方面存在不足,限制了其在复杂任务中的应用。
- REPL-Plan通过引入Read-Eval-Print Loop (REPL)机制,使LLM能够动态执行和评估代码,从而灵活地适应错误和处理模糊情况。
- 实验结果表明,REPL-Plan在多个规划领域取得了显著的性能提升,验证了其有效性和优越性。
📝 摘要(中文)
大型语言模型(LLMs)在常识推理和交互式决策方面表现出强大的能力,但通常难以应对复杂、长期的规划任务。最近的技术试图使用控制流和其他代码邻近技术来构建LLM的输出,以提高规划性能。这些技术包括使用变量(跟踪重要信息)和函数(将复杂任务分解为更小的可重用子任务)。然而,纯粹基于代码的方法可能容易出错,并且不足以处理模糊或非结构化数据。为了应对这些挑战,我们提出REPL-Plan,这是一种LLM规划方法,它完全具有代码表达能力(可以利用代码的所有优点),同时也是动态的(可以灵活地从错误中调整并使用LLM来处理模糊情况)。在REPL-Plan中,LLM通过与Read-Eval-Print Loop (REPL)交互来解决任务,REPL迭代地执行和评估代码,类似于语言shell或交互式代码笔记本,允许模型灵活地纠正错误并动态地处理任务。我们证明,与以前的方法相比,REPL-Plan在各种规划领域都取得了强大的结果。
🔬 方法详解
问题定义:现有的大语言模型在复杂、长期的规划任务中表现不佳,尤其是在需要处理模糊或非结构化数据,以及从错误中恢复时。纯粹依赖代码结构化输出的方法虽然能利用变量和函数等特性,但缺乏足够的灵活性和鲁棒性,容易出错且难以适应动态变化的环境。
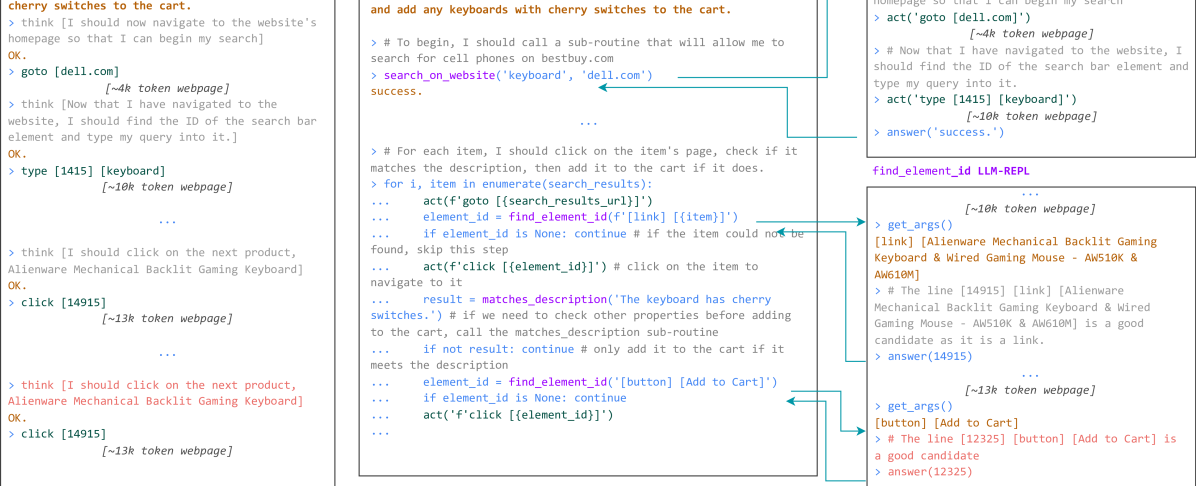
核心思路:REPL-Plan的核心思路是让LLM通过与一个Read-Eval-Print Loop (REPL)环境进行交互来完成规划任务。REPL环境允许LLM执行代码片段,观察执行结果,并根据结果动态地调整后续的规划步骤。这种交互式的过程使得LLM能够灵活地处理错误、利用外部信息,并逐步构建出完整的解决方案。
技术框架:REPL-Plan的整体框架包含LLM和REPL环境两个主要组成部分。LLM负责生成代码片段,这些代码片段描述了规划过程中的一个步骤。REPL环境负责执行这些代码片段,并将执行结果返回给LLM。LLM根据REPL环境的反馈,调整后续的代码生成,直到完成整个规划任务。这个过程类似于开发者使用交互式代码笔记本进行调试和开发。
关键创新:REPL-Plan的关键创新在于将LLM的规划能力与REPL环境的执行能力相结合,实现了动态和交互式的规划过程。这种方法不仅能够利用代码的结构化特性,还能够充分发挥LLM的推理和泛化能力,从而更好地应对复杂和不确定的环境。与传统的基于代码的规划方法相比,REPL-Plan具有更强的适应性和鲁棒性。
关键设计:REPL-Plan的关键设计包括如何设计REPL环境的接口,如何指导LLM生成有效的代码片段,以及如何利用REPL环境的反馈来改进LLM的规划策略。论文中可能涉及了特定的提示工程技巧,用于引导LLM生成符合REPL环境要求的代码。具体的损失函数和网络结构未知,因为论文摘要中没有明确提及。
🖼️ 关键图片

📊 实验亮点
论文展示了REPL-Plan在多个规划领域取得了显著的性能提升。具体的性能数据和对比基线在摘要中没有给出,但强调了REPL-Plan相比于之前的方法具有更强的优势。未来的研究可以进一步量化REPL-Plan的性能提升幅度,并与其他先进的规划方法进行更全面的比较。
🎯 应用场景
REPL-Plan具有广泛的应用前景,例如机器人控制、游戏AI、自动化软件开发等领域。它可以帮助智能体更好地理解和适应复杂环境,从而实现更高效、更可靠的决策和规划。该研究的成果有望推动人工智能技术在实际应用中的发展。
📄 摘要(原文)
Large Language Models (LLMs) demonstrate strong abilities in common-sense reasoning and interactive decision-making, but often struggle with complex, long-horizon planning tasks. Recent techniques have sought to structure LLM outputs using control flow and other code-adjacent techniques to improve planning performance. These techniques include using variables (to track important information) and functions (to divide complex tasks into smaller re-usable sub-tasks). However, purely code-based approaches can be error-prone and insufficient for handling ambiguous or unstructured data. To address these challenges, we propose REPL-Plan, an LLM planning approach that is fully code-expressive (it can utilize all the benefits of code) while also being dynamic (it can flexibly adapt from errors and use the LLM for fuzzy situations). In REPL-Plan, an LLM solves tasks by interacting with a Read-Eval-Print Loop (REPL), which iteratively executes and evaluates code, similar to language shells or interactive code notebooks, allowing the model to flexibly correct errors and handle tasks dynamically. We demonstrate that REPL-Plan achieves strong results across various planning domains compared to previous methods.