Open Grounded Planning: Challenges and Benchmark Construction
作者: Shiguang Guo, Ziliang Deng, Hongyu Lin, Yaojie Lu, Xianpei Han, Le Sun
分类: cs.CL
发布日期: 2024-06-05
备注: Accept to ACL 2024 main conference
💡 一句话要点
提出开放环境下的具身规划任务与基准,评估LLM在可执行规划中的能力
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 开放具身规划 大型语言模型 规划任务 基准数据集 可执行性
📋 核心要点
- 现有LLM规划方法在开放性和可执行性方面存在不足,无法满足现实世界规划的需求。
- 提出开放具身规划任务,要求模型基于可变动作集生成可执行的计划。
- 构建了涵盖多个领域的基准数据集,并评估了现有LLM和规划方法的性能。
📝 摘要(中文)
本文提出了一种新的规划任务——开放具身规划,旨在评估大型语言模型(LLM)在具有可变动作集的环境中生成可执行计划的能力。现有基于LLM的规划方法,要么侧重于利用LLM的语言生成能力来产生自由形式的计划,要么采用强化学习方法来学习受限环境中有限动作集的决策。这两种方法都与现实世界规划中开放性和可执行性的要求存在显著差异。为此,本文构建了一个涵盖广泛领域的开放具身规划基准。通过对当前最先进的LLM以及五种规划方法进行测试,结果表明现有方法难以应对开放领域中具身规划带来的挑战。本文定义并建立了一个开放具身规划的基础数据集,并阐明了基于LLM的规划的潜在挑战和未来方向。
🔬 方法详解
问题定义:论文旨在解决现有LLM在开放、动态环境中进行具身规划时面临的挑战。现有方法要么依赖于LLM的自由文本生成能力,缺乏对环境和动作的约束,导致计划难以执行;要么依赖于强化学习,但仅限于预定义的动作集和受限的环境,泛化能力不足。因此,需要一种能够生成可执行、适应性强的计划的方法,以应对真实世界复杂多变的规划场景。
核心思路:论文的核心思路是将规划任务定义为开放具身规划,强调计划的可执行性以及对可变动作集的处理能力。通过构建一个包含多种场景和动作的基准数据集,可以系统地评估LLM在开放环境下的规划能力。这种方法旨在弥合LLM的语言理解和生成能力与实际规划需求之间的差距。
技术框架:论文主要包含以下几个部分:1) 定义开放具身规划任务,明确任务目标和评估指标。2) 构建包含多个领域和场景的基准数据集,提供丰富的训练和测试数据。3) 评估现有LLM和规划方法在基准数据集上的性能,分析其优缺点。4) 提出未来研究方向,例如如何更好地利用LLM的知识和推理能力,以及如何提高计划的可执行性和鲁棒性。
关键创新:论文的关键创新在于提出了开放具身规划这一新的规划任务,并构建了相应的基准数据集。与以往的研究相比,该任务更加关注计划的可执行性和对可变动作集的处理能力,更贴近真实世界的规划场景。此外,论文还对现有LLM和规划方法进行了全面的评估,为未来的研究提供了重要的参考。
关键设计:基准数据集的设计是关键。数据集需要覆盖多个领域,包含不同类型的动作和约束条件,以全面评估LLM的规划能力。评估指标需要能够反映计划的可执行性、效率和鲁棒性。此外,论文还可能涉及到一些具体的模型设计和训练策略,例如如何利用LLM的上下文学习能力,如何设计奖励函数等,但具体细节未知。
🖼️ 关键图片


📊 实验亮点
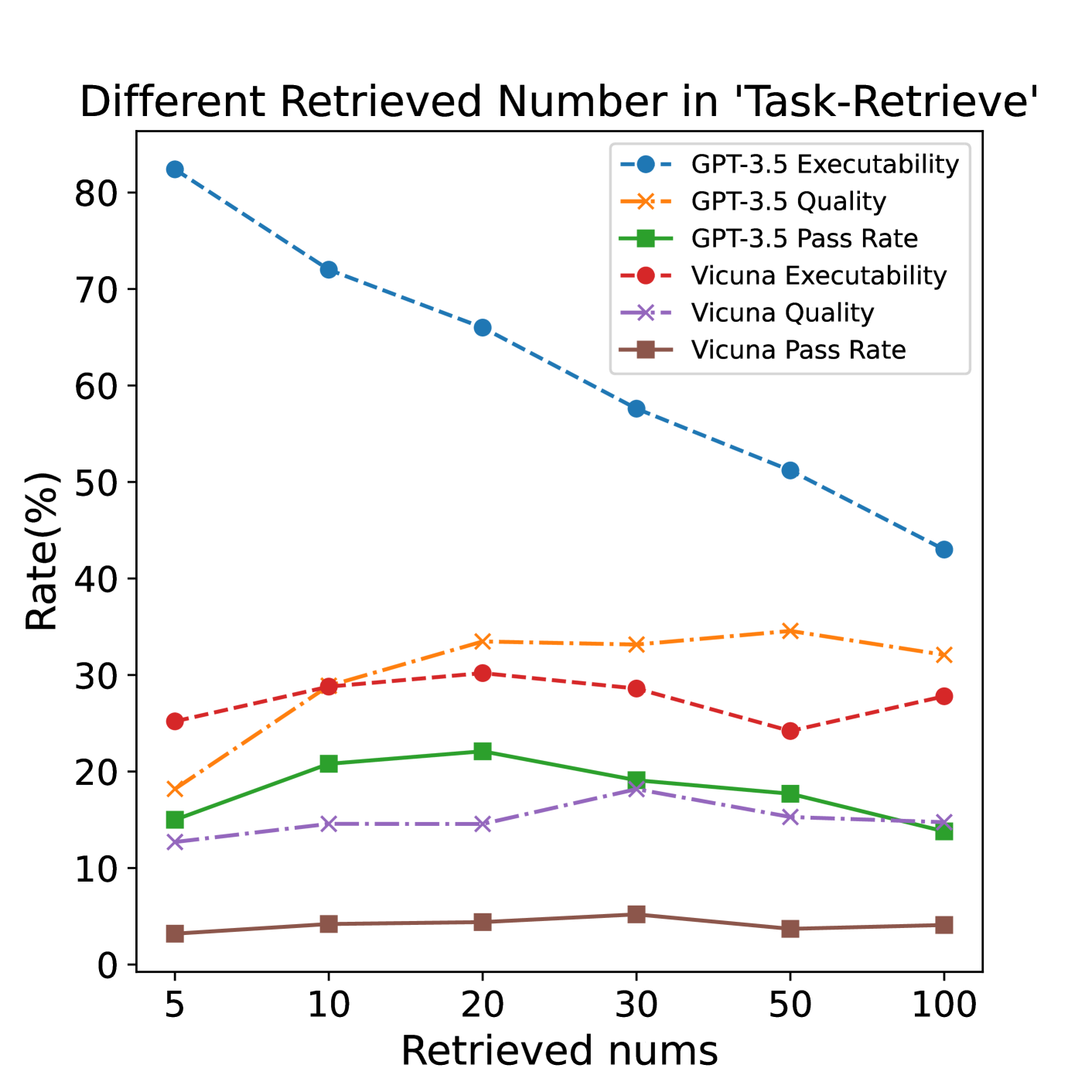
论文构建了一个包含多个领域的开放具身规划基准数据集,并对现有最先进的LLM和五种规划方法进行了测试。实验结果表明,现有方法在开放领域中面临诸多挑战,尤其是在处理可变动作集和保证计划可执行性方面表现不佳。这些结果为未来的研究提供了重要的参考,并指明了LLM在开放环境规划中的潜在改进方向。
🎯 应用场景
该研究成果可应用于机器人导航、智能家居、自动驾驶等领域。通过提高LLM在开放环境下的规划能力,可以使智能体更好地理解人类指令,自主完成复杂任务,从而提升人机交互的效率和用户体验。未来,该研究有望推动通用人工智能的发展,使机器能够像人类一样在复杂环境中进行规划和决策。
📄 摘要(原文)
The emergence of large language models (LLMs) has increasingly drawn attention to the use of LLMs for human-like planning. Existing work on LLM-based planning either focuses on leveraging the inherent language generation capabilities of LLMs to produce free-style plans, or employs reinforcement learning approaches to learn decision-making for a limited set of actions within restricted environments. However, both approaches exhibit significant discrepancies from the open and executable requirements in real-world planning. In this paper, we propose a new planning task--open grounded planning. The primary objective of open grounded planning is to ask the model to generate an executable plan based on a variable action set, thereby ensuring the executability of the produced plan. To this end, we establishes a benchmark for open grounded planning spanning a wide range of domains. Then we test current state-of-the-art LLMs along with five planning approaches, revealing that existing LLMs and methods still struggle to address the challenges posed by grounded planning in open domains. The outcomes of this paper define and establish a foundational dataset for open grounded planning, and shed light on the potential challenges and future directions of LLM-based planning.