Plan-MCTS: Plan Exploration for Action Exploitation in Web Navigation
作者: Weiming Zhang, Jihong Wang, Jiamu Zhou, Qingyao Li, Xinbei Ma, Congmin Zheng, Xingyu Lou, Weiwen Liu, Zhuosheng Zhang, Jun Wang, Yong Yu, Weinan Zhang
分类: cs.AI
发布日期: 2026-02-15
💡 一句话要点
Plan-MCTS:通过规划空间探索提升Web导航中的动作利用
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: Web导航 大型语言模型 树搜索 规划空间 强化学习
📋 核心要点
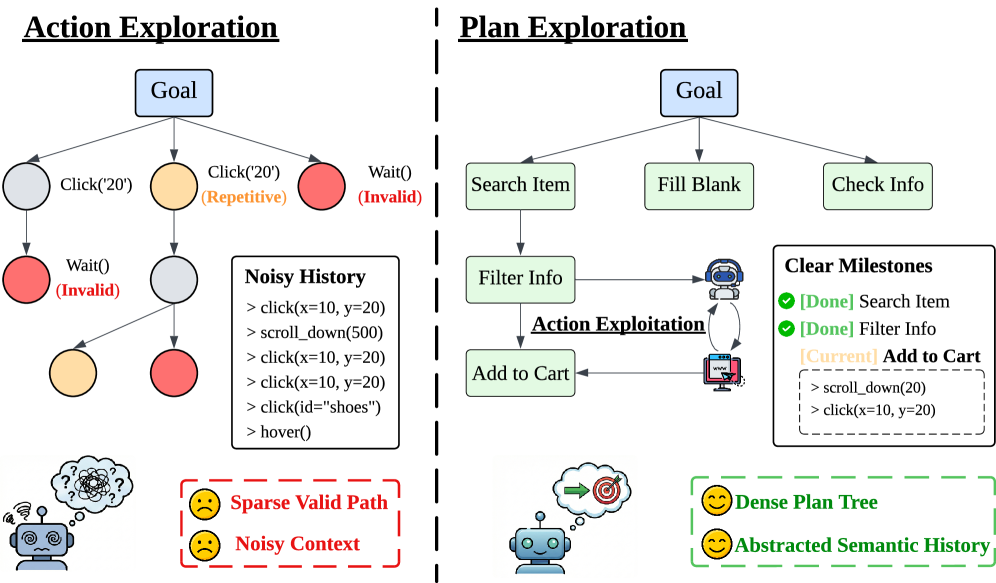
- 现有Web导航方法在长程推理中面临挑战,有效路径稀疏导致探索效率低下,同时嘈杂的上下文干扰了状态感知。
- Plan-MCTS通过解耦战略规划与执行,将探索空间转移到语义规划空间,构建密集规划树,并提炼抽象语义历史。
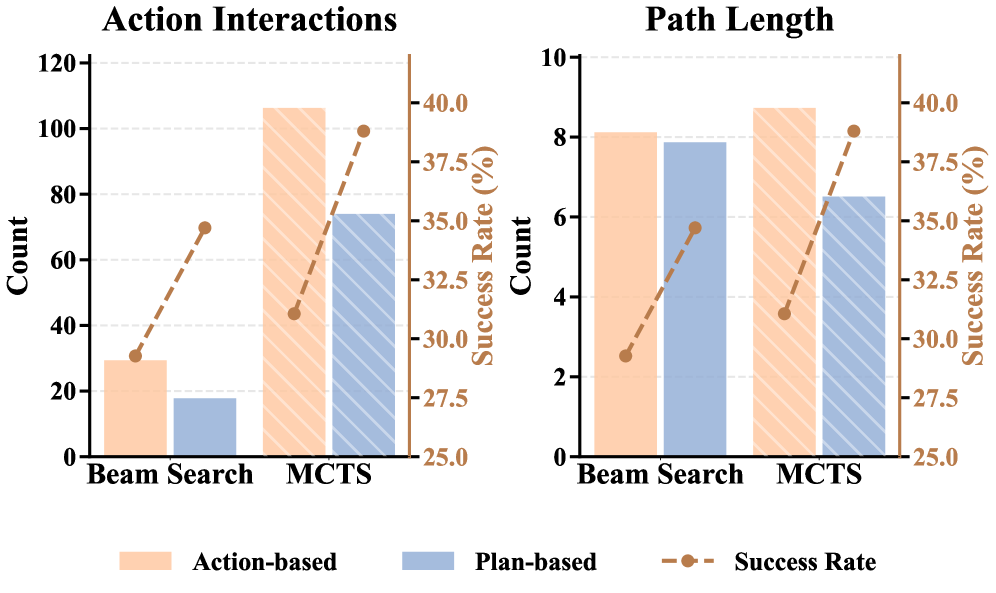
- 实验表明,Plan-MCTS在WebArena上取得了SOTA性能,显著提升了任务有效性和搜索效率,验证了其有效性。
📝 摘要(中文)
大型语言模型(LLMs)已经赋能自主智能体处理复杂的Web导航任务。虽然最近的研究整合了树搜索来增强长程推理,但在Web导航中应用这些算法面临两个关键挑战:导致低效探索的稀疏有效路径,以及稀释精确状态感知的嘈杂上下文。为了解决这个问题,我们引入了Plan-MCTS,该框架通过将探索转移到语义规划空间来重新构建Web导航。通过将战略规划与执行基础分离,它将稀疏动作空间转换为密集规划树以进行高效探索,并将嘈杂的上下文提炼为抽象的语义历史以实现精确的状态感知。为了确保效率和鲁棒性,Plan-MCTS结合了双门控奖励来严格验证物理可执行性和战略一致性,并结合结构细化来对失败的子计划进行在线修复。在WebArena上的大量实验表明,Plan-MCTS实现了最先进的性能,以更高的任务有效性和搜索效率超越了当前的方法。
🔬 方法详解
问题定义:Web导航任务需要智能体在复杂的网页环境中完成特定目标,现有方法在长程推理时面临有效动作路径稀疏的问题,导致探索效率低下。同时,网页内容嘈杂,干扰了智能体对当前状态的准确感知,影响决策。
核心思路:Plan-MCTS的核心思路是将Web导航任务分解为战略规划和执行两个阶段。通过在语义规划空间进行探索,生成高层次的行动计划,然后将这些计划转化为具体的网页操作。这种解耦使得探索过程更加高效,并能更好地应对网页环境的复杂性。
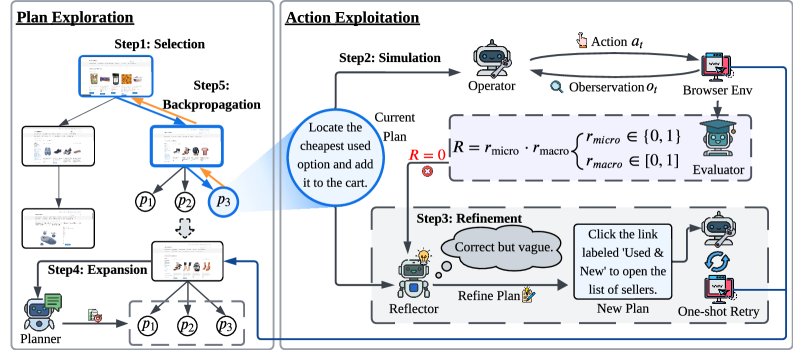
技术框架:Plan-MCTS框架包含以下几个主要模块:1) 语义规划模块:负责在抽象的语义空间中进行规划,生成行动计划。2) 执行模块:将行动计划转化为具体的网页操作。3) 双门控奖励模块:用于评估行动计划的质量,同时考虑物理可执行性和战略一致性。4) 结构细化模块:用于在线修复失败的子计划。
关键创新:Plan-MCTS的关键创新在于将探索空间从原始的动作空间转移到语义规划空间。这种转变使得智能体能够更高效地探索潜在的解决方案,并更好地利用长程推理能力。此外,双门控奖励和结构细化机制进一步提高了智能体的鲁棒性和适应性。
关键设计:Plan-MCTS使用大型语言模型作为语义规划模块的基础,利用其强大的语言理解和生成能力。双门控奖励函数的设计需要仔细权衡物理可执行性和战略一致性,以确保智能体能够生成既可行又有效的行动计划。结构细化模块则通过在线学习的方式,不断优化子计划的执行策略。
🖼️ 关键图片
📊 实验亮点
Plan-MCTS在WebArena基准测试中取得了显著的性能提升,超越了现有的SOTA方法。实验结果表明,Plan-MCTS在任务完成率和搜索效率方面均有显著优势,证明了其在复杂Web导航任务中的有效性。具体数据需要在论文中查找。
🎯 应用场景
Plan-MCTS具有广泛的应用前景,可应用于智能客服、自动化测试、信息检索等领域。通过提升Web导航的效率和准确性,可以显著提高用户体验,降低人工成本。未来,该技术有望应用于更复杂的Web任务,例如自动化数据抓取、智能推荐等。
📄 摘要(原文)
Large Language Models (LLMs) have empowered autonomous agents to handle complex web navigation tasks. While recent studies integrate tree search to enhance long-horizon reasoning, applying these algorithms in web navigation faces two critical challenges: sparse valid paths that lead to inefficient exploration, and a noisy context that dilutes accurate state perception. To address this, we introduce Plan-MCTS, a framework that reformulates web navigation by shifting exploration to a semantic Plan Space. By decoupling strategic planning from execution grounding, it transforms sparse action space into a Dense Plan Tree for efficient exploration, and distills noisy contexts into an Abstracted Semantic History for precise state awareness. To ensure efficiency and robustness, Plan-MCTS incorporates a Dual-Gating Reward to strictly validate both physical executability and strategic alignment and Structural Refinement for on-policy repair of failed subplans. Extensive experiments on WebArena demonstrate that Plan-MCTS achieves state-of-the-art performance, surpassing current approaches with higher task effectiveness and search efficiency.