HCVR Scene Generation: High Compatibility Virtual Reality Environment Generation for Extended Redirected Walking
作者: Yiran Zhang, Xingpeng Sun, Aniket Bera
分类: cs.MM, cs.AI
发布日期: 2026-01-21
💡 一句话要点
提出HCVR框架,为扩展重定向行走生成高兼容性虚拟现实环境
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 虚拟现实 重定向行走 场景生成 物理兼容性 大型语言模型
📋 核心要点
- 现有重定向行走技术在物理和虚拟环境差异较大时效果不佳,导致用户碰撞。
- HCVR框架利用ENI++度量评估物理和虚拟空间的不兼容性,并指导场景生成。
- 实验表明,HCVR显著减少了物理碰撞,降低了不兼容性得分,并提升了用户对布局设计的满意度。
📝 摘要(中文)
为了提升虚拟现实(VR)中自然行走的沉浸感,并解决物理空间限制和大场景探索问题,本研究提出HCVR(高兼容性虚拟现实环境生成)框架,专门为基于对齐的重定向行走(RDW)控制器优化生成虚拟场景。HCVR首先采用ENI++度量,通过比较旋转敏感的可见性多边形来评估物理和虚拟空间的不兼容性。然后,在ENI++兼容性图和用户提示的指导下,利用大型语言模型(LLM)进行上下文感知的3D资产检索和初始布局生成。最后,策略性地调整对象选择、缩放和放置,以最大化覆盖虚拟不兼容区域,引导用户走向RDW可行的路径。用户研究表明,与基于LLM的生成方法相比,HCVR生成的场景物理碰撞次数减少了22.78倍,ENI++得分降低了35.89%,且布局设计用户反馈评分提高了12.5%。
🔬 方法详解
问题定义:现有重定向行走(RDW)技术依赖于预定义的虚拟环境(VE),当物理空间和虚拟空间存在显著几何差异时,RDW的有效性会大大降低,导致用户在虚拟环境中发生物理碰撞。现有的场景生成方法主要关注对象关系或布局美学,忽略了RDW所需的物理兼容性,即生成的虚拟环境难以通过RDW技术引导用户避开物理障碍。
核心思路:HCVR的核心思路是生成与物理环境高度兼容的虚拟场景,从而最大化RDW的有效性。通过量化物理和虚拟环境之间的不兼容性,并将其作为场景生成过程中的指导信号,HCVR能够生成更适合RDW的虚拟环境,减少用户碰撞。
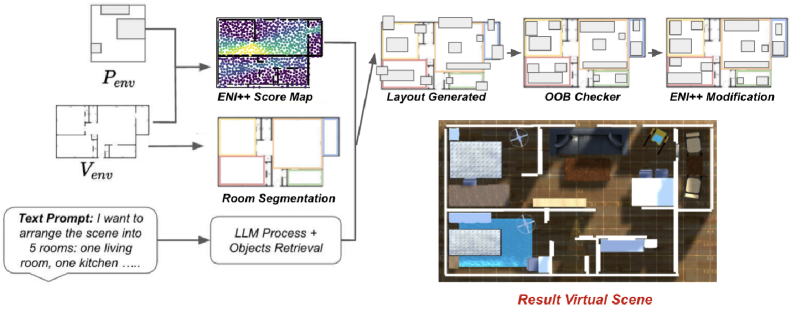
技术框架:HCVR框架包含三个主要阶段:1) 不兼容性评估:使用ENI++度量来评估物理和虚拟空间之间的不兼容性,生成兼容性图。2) 初始布局生成:利用大型语言模型(LLM)根据用户提示和兼容性图进行上下文感知的3D资产检索和初始布局生成。3) 布局优化:策略性地调整对象选择、缩放和放置,以最大化覆盖虚拟不兼容区域,引导用户走向RDW可行的路径。
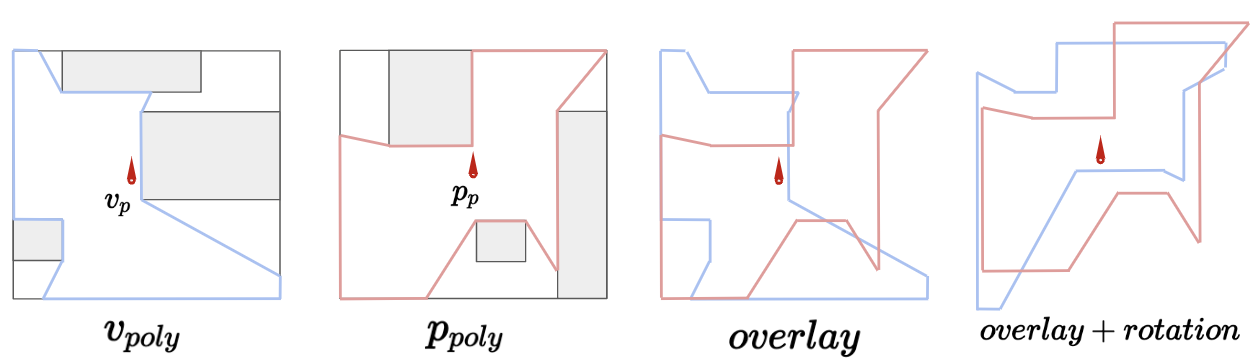
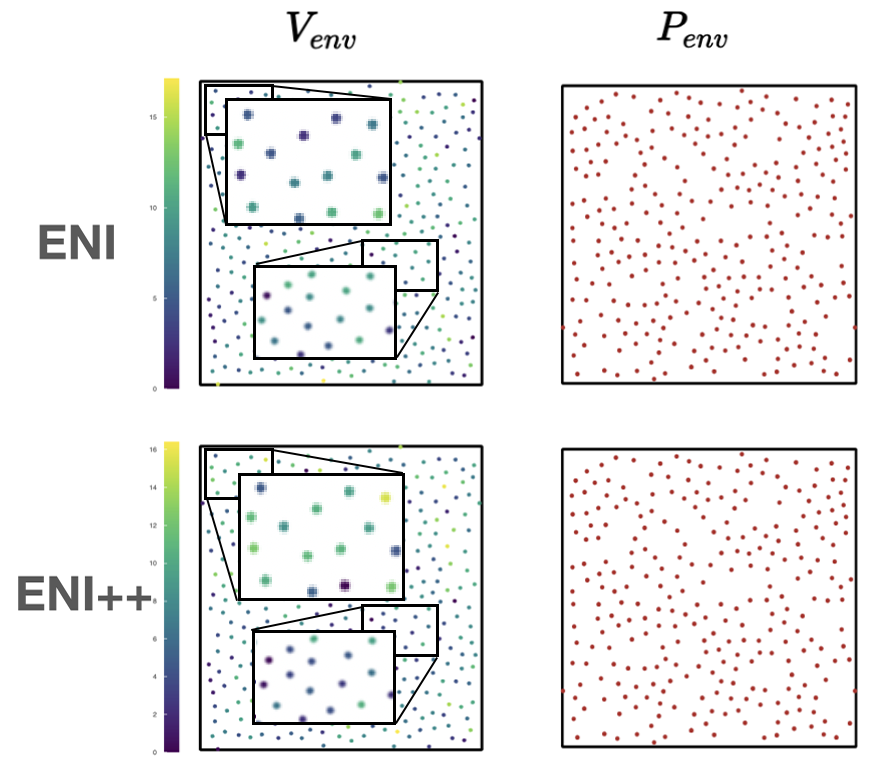
关键创新:HCVR的关键创新在于引入了ENI++度量作为场景生成过程中的指导信号。ENI++是一种边界敏感的度量,通过比较旋转敏感的可见性多边形来评估物理和虚拟空间的不兼容性。与现有方法相比,ENI++能够更准确地捕捉物理和虚拟环境之间的几何差异,从而生成更适合RDW的虚拟环境。
关键设计:ENI++度量计算旋转敏感的可见性多边形之间的差异,考虑了用户在虚拟环境中旋转的可能性。LLM用于根据用户提示生成初始布局,并根据ENI++兼容性图进行调整。布局优化阶段使用启发式算法来调整对象的位置和大小,以最大化覆盖不兼容区域,并确保生成的场景在视觉上是合理的。
🖼️ 关键图片
📊 实验亮点
实验结果表明,与基于LLM的生成方法相比,HCVR生成的场景物理碰撞次数减少了22.78倍,ENI++得分降低了35.89%,用户对布局设计的反馈评分提高了12.5%。这些数据表明HCVR能够显著提升RDW的有效性,并改善用户的VR体验。
🎯 应用场景
HCVR技术可应用于VR游戏、VR训练、VR旅游等领域,通过生成与物理空间高度兼容的虚拟环境,提升用户的沉浸感和安全性。该技术还可以用于辅助建筑设计,在设计阶段评估建筑布局对VR体验的影响,并进行优化。未来,HCVR可以与更先进的RDW技术结合,实现更自然的VR交互。
📄 摘要(原文)
Natural walking enhances immersion in virtual environments (VEs), but physical space limitations and obstacles hinder exploration, especially in large virtual scenes. Redirected Walking (RDW) techniques mitigate this by subtly manipulating the virtual camera to guide users away from physical collisions within pre-defined VEs. However, RDW efficacy diminishes significantly when substantial geometric divergence exists between the physical and virtual environments, leading to unavoidable collisions. Existing scene generation methods primarily focus on object relationships or layout aesthetics, often neglecting the crucial aspect of physical compatibility required for effective RDW. To address this, we introduce HCVR (High Compatibility Virtual Reality Environment Generation), a novel framework that generates virtual scenes inherently optimized for alignment-based RDW controllers. HCVR first employs ENI++, a novel, boundary-sensitive metric to evaluate the incompatibility between physical and virtual spaces by comparing rotation-sensitive visibility polygons. Guided by the ENI++ compatibility map and user prompts, HCVR utilizes a Large Language Model (LLM) for context-aware 3D asset retrieval and initial layout generation. The framework then strategically adjusts object selection, scaling, and placement to maximize coverage of virtually incompatible regions, effectively guiding users towards RDW-feasible paths. User studies evaluating physical collisions and layout quality demonstrate HCVR's effectiveness with HCVR-generated scenes, resulting in 22.78 times fewer physical collisions and received 35.89\% less on ENI++ score compared to LLM-based generation with RDW, while also receiving 12.5\% higher scores on user feedback to layout design.