Active Sensing Shapes Real-World Decision-Making through Dynamic Evidence Accumulation
作者: Hongliang Lu, Yunmeng Liu, Junjie Yang
分类: cs.AI, cs.HC, cs.RO, q-bio.NC
发布日期: 2025-12-18
💡 一句话要点
提出基于动态证据累积的主动感知模型,用于解释真实驾驶场景中的决策过程
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 主动感知 证据累积模型 驾驶行为 眼动追踪 决策过程
📋 核心要点
- 现有证据累积模型(EAM)在实验室环境中有效,但难以直接应用于证据可供性不同的真实世界场景。
- 论文提出一种认知方案,形式化现实世界证据的可供性,并通过眼动追踪捕捉主动感知行为。
- 实验表明该方案能有效描绘驾驶员心理信念的累积过程,并揭示证据可供性与注意力分配之间的关系。
📝 摘要(中文)
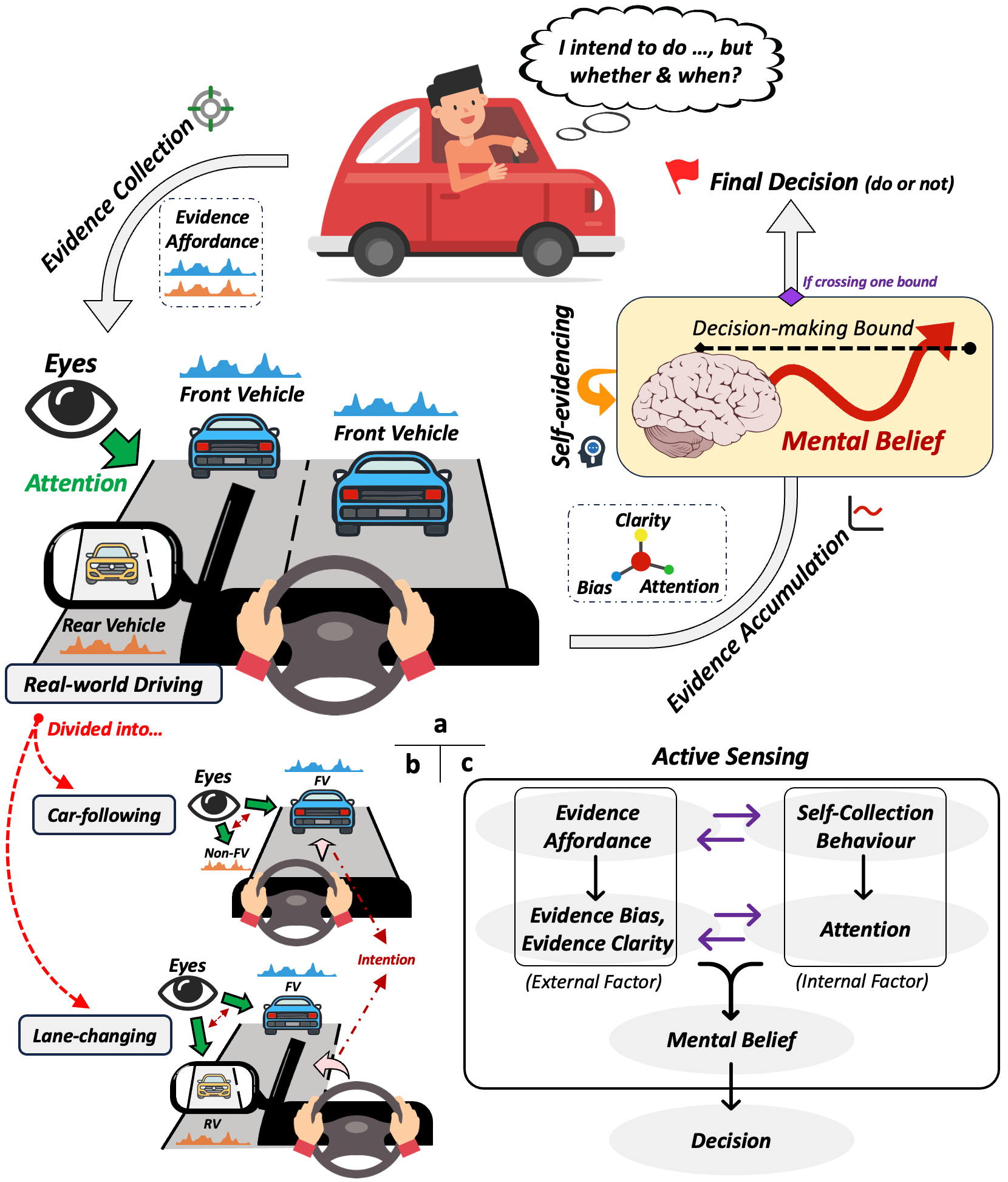
人类决策严重依赖于主动感知,这是一种用于收集证据以适应不断变化环境的认知行为。然而,它在现实世界中的运作机制仍然不明确。目前,一种称为证据累积建模(EAM)的实验室范式表明,人类决策涉及将外部证据转化为内部心理信念。然而,现实世界环境与实验室设置之间证据可供性的差距阻碍了EAM的有效应用。本文将EAM推广到现实世界,并在真实的驾驶场景中进行分析。提出了一个认知方案来形式化现实世界的证据可供性,并通过眼动追踪捕捉主动感知。实验结果表明,该方案能够合理地描绘驾驶员心理信念的累积,从信息效用的角度解释主动感知如何将证据转化为心理信念。此外,结果表明证据可供性与个体招募的注意力之间存在负相关关系,揭示了驾驶员如何在不同情境下调整其证据收集模式。此外,揭示了证据可供性和注意力分配对决策倾向的积极影响。总之,该计算方案将EAM推广到现实世界环境,并全面解释了主动感知如何支撑现实世界的决策,揭示了现实世界决策中多因素、综合的特征。
🔬 方法详解
问题定义:现有证据累积模型(EAM)主要在实验室环境下进行研究,其证据呈现方式与真实世界存在显著差异。直接将EAM应用于真实场景,难以有效捕捉人类在复杂、动态环境下的决策过程,尤其是在主动感知方面,如何量化和建模真实世界的证据可供性是一个关键挑战。
核心思路:论文的核心思路是将EAM推广到真实世界,通过形式化现实世界的证据可供性,并结合眼动追踪技术捕捉主动感知行为。通过分析驾驶员的眼动数据,推断其在不同情境下的信息收集策略和心理信念的累积过程。这种方法旨在弥合实验室研究与真实世界应用之间的差距,更全面地理解人类在复杂环境下的决策机制。
技术框架:该研究的技术框架主要包括以下几个阶段:1) 数据采集:通过驾驶模拟器或真实驾驶场景收集驾驶员的驾驶行为数据和眼动数据。2) 证据可供性建模:提出一种认知方案来形式化现实世界的证据可供性,例如,根据交通标志的可见度、车辆周围环境的复杂程度等因素来量化证据的强度。3) 证据累积建模:将EAM应用于驾驶场景,利用眼动数据作为主动感知的指标,模拟驾驶员心理信念的累积过程。4) 模型评估:通过实验数据验证模型的有效性,并分析证据可供性、注意力分配与决策倾向之间的关系。
关键创新:该论文的关键创新在于将EAM推广到真实世界,并提出了一种形式化现实世界证据可供性的方法。通过结合眼动追踪技术,能够更准确地捕捉人类在复杂环境下的主动感知行为,并将其纳入决策模型中。此外,该研究还揭示了证据可供性与注意力分配之间的负相关关系,以及它们对决策倾向的积极影响。
关键设计:论文的关键设计包括:1) 证据可供性的量化方法,需要根据具体场景选择合适的指标,例如,交通标志的清晰度、车辆周围环境的复杂程度等。2) 眼动数据的处理方法,需要提取与决策相关的眼动指标,例如,注视时间、注视次数等。3) EAM的具体实现方式,需要根据驾驶场景的特点进行调整,例如,选择合适的累积函数、阈值等。4) 模型参数的优化方法,需要通过实验数据进行训练和验证,以获得最佳的模型性能。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方案能够合理地描绘驾驶员心理信念的累积,并揭示了证据可供性与个体招募的注意力之间存在负相关关系。此外,研究还发现证据可供性和注意力分配对决策倾向具有积极影响。这些结果验证了该计算方案在现实世界驾驶场景中的有效性,并为理解人类决策机制提供了新的视角。
🎯 应用场景
该研究成果可应用于智能驾驶系统的开发,通过模拟驾驶员的认知过程,提高自动驾驶系统的决策能力和安全性。此外,该研究还可以应用于交通安全领域,例如,通过分析驾驶员的眼动数据,评估其驾驶风险,并提供个性化的安全建议。该研究对于理解人类在复杂环境下的决策机制具有重要意义。
📄 摘要(原文)
Human decision-making heavily relies on active sensing, a well-documented cognitive behaviour for evidence gathering to accommodate ever-changing environments. However, its operational mechanism in the real world remains non-trivial. Currently, an in-laboratory paradigm, called evidence accumulation modelling (EAM), points out that human decision-making involves transforming external evidence into internal mental beliefs. However, the gap in evidence affordance between real-world contexts and laboratory settings hinders the effective application of EAM. Here we generalize EAM to the real world and conduct analysis in real-world driving scenarios. A cognitive scheme is proposed to formalize real-world evidence affordance and capture active sensing through eye movements. Empirically, our scheme can plausibly portray the accumulation of drivers' mental beliefs, explaining how active sensing transforms evidence into mental beliefs from the perspective of information utility. Also, our results demonstrate a negative correlation between evidence affordance and attention recruited by individuals, revealing how human drivers adapt their evidence-collection patterns across various contexts. Moreover, we reveal the positive influence of evidence affordance and attention distribution on decision-making propensity. In a nutshell, our computational scheme generalizes EAM to real-world contexts and provides a comprehensive account of how active sensing underlies real-world decision-making, unveiling multifactorial, integrated characteristics in real-world decision-making.