TinyMyo: a Tiny Foundation Model for Flexible EMG Signal Processing at the Edge
作者: Matteo Fasulo, Giusy Spacone, Thorir Mar Ingolfsson, Yawei Li, Luca Benini, Andrea Cossettini
分类: eess.SP, cs.AI, cs.HC, cs.LG
发布日期: 2025-12-05 (更新: 2026-01-15)
💡 一句话要点
提出TinyMyo,一种轻量级EMG基础模型,用于边缘设备上的灵活肌电信号处理
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 肌电信号 基础模型 自监督学习 Transformer 边缘计算 低功耗 人机交互
📋 核心要点
- 现有EMG基础模型难以兼顾多任务泛化能力和在嵌入式平台上的部署需求,限制了其应用。
- TinyMyo采用轻量级Transformer编码器,通过自监督学习进行预训练,并针对边缘设备进行了优化。
- 实验表明,TinyMyo在多个EMG下游任务上达到或超过了现有技术水平,并成功部署在超低功耗微控制器上。
📝 摘要(中文)
本文提出TinyMyo,一个基于Transformer编码器架构的轻量级基础模型,用于表面肌电信号(EMG)处理。该模型通过在公开数据集上使用掩码重建进行自监督预训练。TinyMyo仅有3.6M参数,旨在通过最小的任务特定头部适配来支持多个下游任务。实验结果表明,TinyMyo在手势分类、手部运动学回归、语音产生和语音识别等任务上表现出色,性能与现有技术水平相当或更高,且模型大小低于5M参数。在NinaPro DB5 (89.4%)、UCI-EMG (97.56%)和EPN-612 (96.74%)数据集上,TinyMyo取得了与之前基于基础模型的工作相比,最好的结果。此外,首次在超低功耗微控制器(GAP9)上部署了EMG基础模型,推理时间为0.785秒,能量为44.91毫焦,功耗为57.18毫瓦。
🔬 方法详解
问题定义:论文旨在解决表面肌电信号(EMG)处理中跨被试、记录系统和采集协议的泛化性问题,以及现有EMG基础模型难以在低功耗边缘设备上部署的问题。现有方法的痛点在于模型体积大,计算复杂度高,难以满足边缘设备的资源限制,且泛化能力不足。
核心思路:论文的核心思路是设计一个轻量级的基础模型TinyMyo,通过自监督学习方法进行预训练,使其能够学习到通用的EMG信号表示,从而在多个下游任务上实现良好的泛化性能。同时,模型的设计也充分考虑了边缘设备的资源限制,使其能够在低功耗微控制器上高效运行。
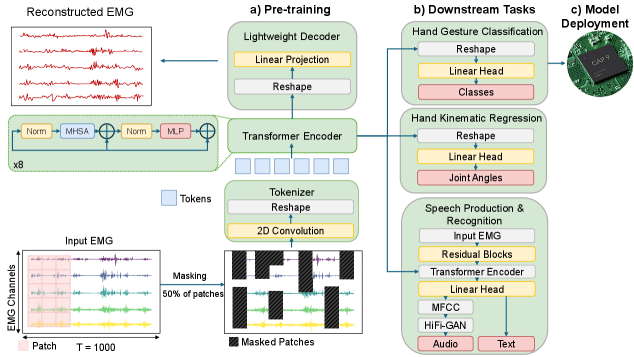
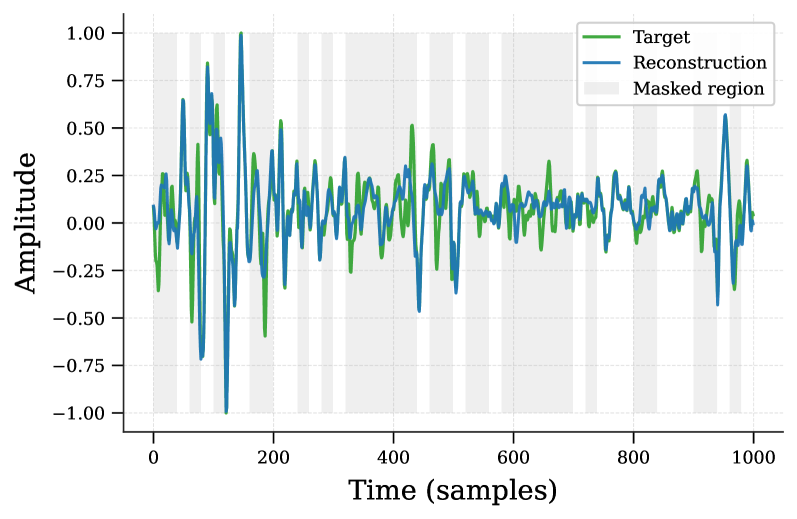
技术框架:TinyMyo的整体架构基于Transformer编码器,包含嵌入层、Transformer编码器层和任务特定头部。首先,EMG信号经过嵌入层转换为向量表示。然后,Transformer编码器层学习EMG信号的上下文信息。最后,任务特定头部将编码器的输出映射到具体的任务目标,如手势分类或运动学回归。预训练阶段采用掩码重建任务,即随机掩盖部分EMG信号,然后让模型预测被掩盖的部分。
关键创新:TinyMyo的关键创新在于其轻量级的模型设计和在边缘设备上的部署能力。相比于现有的EMG基础模型,TinyMyo的模型参数量更少,计算复杂度更低,更适合在资源受限的边缘设备上运行。此外,TinyMyo是第一个在超低功耗微控制器上部署的EMG基础模型。
关键设计:TinyMyo的关键设计包括:1) 采用轻量级的Transformer编码器架构,减少模型参数量;2) 使用自监督学习方法进行预训练,提高模型的泛化能力;3) 针对边缘设备的资源限制,对模型进行优化,如量化和剪枝;4) 采用掩码比例为15%的掩码重建任务进行预训练;5) 使用AdamW优化器进行训练,学习率为1e-4,权重衰减为0.01。
🖼️ 关键图片
📊 实验亮点
TinyMyo在NinaPro DB5、UCI-EMG和EPN-612数据集上取得了与之前基于基础模型的工作相比,最好的结果,分别为89.4%、97.56%和96.74%。此外,首次在超低功耗微控制器(GAP9)上部署了EMG基础模型,推理时间为0.785秒,能量为44.91毫焦,功耗为57.18毫瓦,验证了其在边缘设备上的可行性。
🎯 应用场景
TinyMyo在生物力学、康复、假肢控制和人机交互等领域具有广泛的应用前景。它可以用于运动意图解码、神经肌肉评估和生物信号驱动的人机交互。由于其能够在低功耗边缘设备上运行,因此可以实现可扩展且节能的传感,为远程医疗、智能穿戴设备等应用提供支持,并有望改善残疾人士的生活质量。
📄 摘要(原文)
Objective: Surface electromyography (EMG) is a non-invasive sensing modality widely used in biomechanics, rehabilitation, prosthetic control, and human-machine interfaces. Despite decades of use, achieving robust generalization across subjects, recording systems, and acquisition protocols remains challenging. While foundation models (FMs) are gaining traction for EMG, existing approaches remain limited to single downstream tasks and lack deployability on embedded platforms. This work addresses these limitations. Methods: We present TinyMyo, a lightweight FM based on a Transformer encoder architecture. The model is pre-trained in a self-supervised manner using masked reconstruction on publicly available datasets. With only 3.6M parameters, TinyMyo is designed to support multiple downstream tasks through minimal task-specific head adaptations. Results: We demonstrate generalization across hand gesture classification, hand kinematic regression, speech production and speech recognition, with performance comparable to or surpassing the state of the art (SoA), and model size below 5M parameters. We achieve SoA results compared to previous FM-based works on the NinaPro DB5 (89.4%), UCI-EMG (97.56%), and EPN-612 (96.74%) datasets. We demonstrate the first-time deployment of an EMG FM on an ultra-low power microcontroller (GAP9), with an inference time of 0.785 s, energy of 44.91 mJ and power envelope of 57.18 mW. Conclusion: TinyMyo demonstrates that compact, self-supervised EMG FM can guarantee strong generalization across multiple downstream tasks while remaining compatible with low-power edge devices. Significance: TinyMyo is the first EMG FM for ultra-low power edge devices, enabling scalable and energy-efficient sensing for motor intent decoding, neuromuscular assessment, and biosignal driven human-machine interaction.