Hybrid Modeling, Sim-to-Real Reinforcement Learning, and Large Language Model Driven Control for Digital Twins
作者: Adil Rasheed, Oscar Ravik, Omer San
分类: cs.AI
发布日期: 2025-10-27
💡 一句话要点
针对数字孪生,提出混合建模、Sim-to-Real强化学习及LLM驱动控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 数字孪生 混合建模 强化学习 模型预测控制 大型语言模型 Sim-to-Real 动态系统
📋 核心要点
- 现有动态系统建模方法在精度、泛化性和计算效率之间存在权衡,难以同时满足数字孪生的需求。
- 提出一种混合建模方法HAM,结合物理模型和数据驱动模型,以期在精度、泛化性和效率之间取得平衡。
- 通过微型温室实验,验证了HAM模型在建模方面的优势,并评估了MPC、RL和LLM三种控制策略的性能。
📝 摘要(中文)
本研究探讨了数字孪生在动态系统建模与控制中的应用,融合了基于物理、数据驱动和混合方法,并结合了传统和人工智能驱动的控制器。以微型温室为测试平台,开发并比较了四种预测模型:线性模型、基于物理的建模(PBM)、长短期记忆网络(LSTM)以及混合分析与建模(HAM),涵盖了插值和外推场景。同时,实施了三种控制策略:模型预测控制(MPC)、强化学习(RL)和基于大型语言模型(LLM)的控制,以评估精度、适应性和实施工作量之间的权衡。结果表明,在建模方面,HAM在准确性、泛化性和计算效率方面提供了最平衡的性能,而LSTM以更高的资源成本实现了高精度。在控制器方面,MPC提供了稳健和可预测的性能,RL表现出强大的适应性,而基于LLM的控制器在与预测工具结合使用时,提供了灵活的人机交互。
🔬 方法详解
问题定义:论文旨在解决动态系统建模与控制问题,特别是在数字孪生应用中。现有方法,如纯物理模型计算量大,数据驱动模型泛化性差,传统控制方法适应性弱,难以满足复杂动态系统的需求。
核心思路:论文的核心思路是结合不同建模方法的优势,提出混合建模方法HAM,并探索不同控制策略(MPC、RL、LLM)在数字孪生中的应用,以实现精度、泛化性和适应性的平衡。通过Sim-to-Real强化学习,提升控制策略在真实环境中的性能。
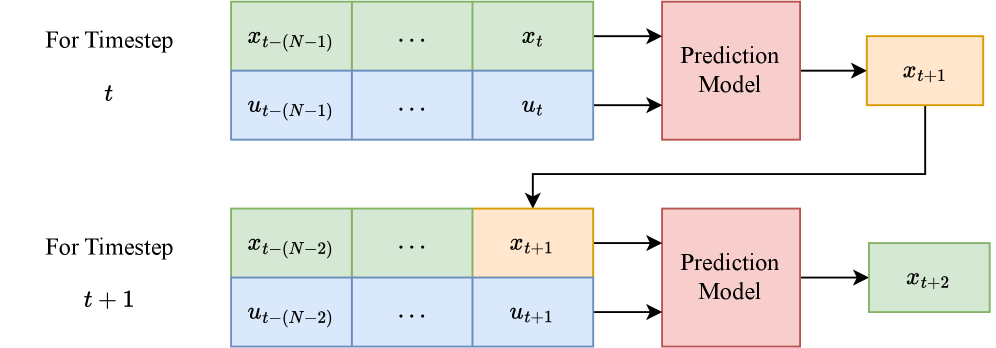
技术框架:整体框架包括:1) 建立微型温室的数字孪生;2) 开发四种预测模型(线性、PBM、LSTM、HAM);3) 实施三种控制策略(MPC、RL、LLM);4) 在插值和外推场景下,评估模型和控制器的性能。HAM模型将物理模型与数据驱动模型相结合,利用物理模型提供先验知识,利用数据驱动模型修正模型误差。
关键创新:论文的关键创新在于:1) 提出混合建模方法HAM,在精度、泛化性和计算效率之间取得平衡;2) 探索了LLM在动态系统控制中的应用,实现了灵活的人机交互;3) 结合Sim-to-Real强化学习,提升了控制策略在真实环境中的性能。
关键设计:HAM模型的具体实现细节未知,但可以推测其关键设计包括:物理模型和数据驱动模型的融合方式(例如,加权平均、级联等),数据驱动模型的选择(例如,神经网络、支持向量机等),以及模型参数的优化方法。RL控制器的设计可能包括:状态空间、动作空间、奖励函数的设计,以及强化学习算法的选择(例如,Q-learning、SARSA、Actor-Critic等)。LLM控制器的设计可能包括:提示工程、上下文学习等。
🖼️ 关键图片


📊 实验亮点
实验结果表明,HAM模型在建模方面表现出最佳的平衡性,在准确性、泛化性和计算效率之间取得了较好的折衷。LSTM模型虽然精度较高,但资源消耗也较大。在控制方面,MPC表现稳健,RL具有较强的适应性,而LLM控制器在人机交互方面具有优势。具体的性能数据未知。
🎯 应用场景
该研究成果可应用于各种动态系统的数字孪生建模与控制,例如智能农业、智能制造、智慧城市等。通过结合混合建模和AI驱动的控制策略,可以提高系统的精度、效率和适应性,实现更智能化的管理和优化。未来,该研究可以进一步扩展到更复杂的系统,并探索更多AI技术在数字孪生中的应用。
📄 摘要(原文)
This work investigates the use of digital twins for dynamical system modeling and control, integrating physics-based, data-driven, and hybrid approaches with both traditional and AI-driven controllers. Using a miniature greenhouse as a test platform, four predictive models Linear, Physics-Based Modeling (PBM), Long Short Term Memory (LSTM), and Hybrid Analysis and Modeling (HAM) are developed and compared under interpolation and extrapolation scenarios. Three control strategies Model Predictive Control (MPC), Reinforcement Learning (RL), and Large Language Model (LLM) based control are also implemented to assess trade-offs in precision, adaptability, and implementation effort. Results show that in modeling HAM provides the most balanced performance across accuracy, generalization, and computational efficiency, while LSTM achieves high precision at greater resource cost. Among controllers, MPC delivers robust and predictable performance, RL demonstrates strong adaptability, and LLM-based controllers offer flexible human-AI interaction when coupled with predictive tools.