Local Guidance for Configuration-Based Multi-Agent Pathfinding
作者: Tomoki Arita, Keisuke Okumura
分类: cs.MA, cs.AI, cs.RO
发布日期: 2025-10-21 (更新: 2025-11-15)
备注: To be presented at AAAI-26
💡 一句话要点
提出基于局部引导的多智能体路径规划方法,提升配置空间搜索效率。
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 多智能体路径规划 局部引导 配置空间搜索 实时规划 LaCAM
📋 核心要点
- 现有MAPF方法依赖全局信息缓解拥堵,但计算成本高昂,实时性受限。
- 论文提出局部引导策略,在智能体附近提供时空线索,降低计算复杂度。
- 实验表明,局部引导能显著提升LaCAM等求解器的性能,达到新的性能水平。
📝 摘要(中文)
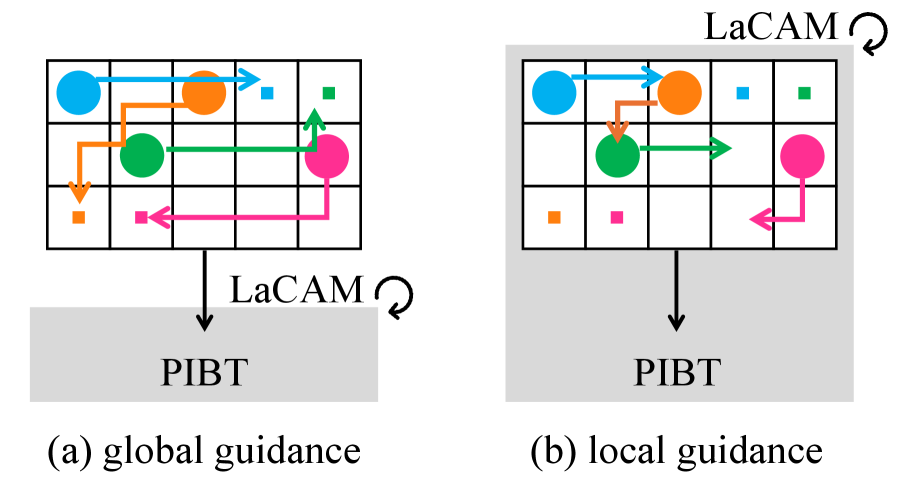
引导是一种新兴概念,它通过考虑所有智能体在整个工作空间中的集体行为,为实时、次优的多智能体路径规划(MAPF)方法提供额外信息,从而缓解全局范围内的拥堵,改善经验性能。这种全局视角有助于减少智能体的等待时间,从而提高整体协调效率。与此相反,本研究探索了一种替代方法:在每个智能体附近提供局部引导。虽然这种局部方法涉及智能体移动时的重新计算,并且可能在计算上要求较高,但我们通过实验证明,为规划器提供信息丰富的时空线索可以显著提高解决方案的质量,而不会超出适中的时间预算。当应用于领先的基于配置的求解器LaCAM时,这种形式的引导为MAPF建立了一个新的性能前沿。
🔬 方法详解
问题定义:多智能体路径规划(MAPF)问题旨在为多个智能体在共享环境中找到无碰撞的路径。现有方法,特别是那些依赖全局信息的引导策略,虽然能有效缓解拥堵,但计算复杂度较高,难以满足实时性要求。痛点在于如何在保证解的质量的前提下,降低计算成本,提高规划效率。
核心思路:论文的核心思路是利用局部信息进行引导,而非全局信息。具体来说,就是在每个智能体附近提供时空线索,引导智能体选择更优的局部路径。这种局部引导策略降低了计算复杂度,因为只需要考虑局部环境,而无需考虑整个工作空间。
技术框架:该方法将局部引导策略集成到现有的基于配置的MAPF求解器LaCAM中。整体流程如下:1. 初始化:为每个智能体分配初始位置和目标位置。2. 局部引导:在每个智能体附近生成时空线索,例如,预测未来一段时间内的最优局部路径。3. 路径规划:利用LaCAM求解器,结合局部引导信息,为每个智能体规划路径。4. 执行:智能体按照规划的路径移动。5. 重复:在智能体移动后,重新进行局部引导和路径规划,直到所有智能体到达目标位置。
关键创新:最重要的技术创新点在于将全局引导策略转变为局部引导策略。与全局引导相比,局部引导只需要考虑局部环境,降低了计算复杂度,提高了规划效率。此外,局部引导可以更好地适应动态环境,因为可以根据智能体的移动和环境的变化进行实时调整。
关键设计:论文中没有详细描述局部引导信息的具体生成方式,例如,如何预测未来一段时间内的最优局部路径。这部分可能是未来的研究方向。此外,如何平衡局部引导的精度和计算成本也是一个关键的设计问题。论文中提到,需要确保在适中的时间预算内完成局部引导和路径规划。
🖼️ 关键图片

📊 实验亮点
实验结果表明,将局部引导策略应用于LaCAM求解器后,MAPF的性能得到了显著提升。具体来说,在相同的时间预算下,局部引导策略能够找到更高质量的解,即更短的路径长度和更少的冲突。该方法为MAPF建立了一个新的性能前沿,表明局部引导是一种有效的MAPF优化策略。
🎯 应用场景
该研究成果可应用于仓库机器人、自动驾驶、游戏AI等领域。通过局部引导,能显著提升多智能体系统的协作效率和实时性,降低计算资源消耗。未来,该方法有望应用于更大规模、更复杂的场景,例如,城市交通管理、无人机集群控制等。
📄 摘要(原文)
Guidance is an emerging concept that improves the empirical performance of real-time, sub-optimal multi-agent pathfinding (MAPF) methods. It offers additional information to MAPF algorithms to mitigate congestion on a global scale by considering the collective behavior of all agents across the entire workspace. This global perspective helps reduce agents' waiting times, thereby improving overall coordination efficiency. In contrast, this study explores an alternative approach: providing local guidance in the vicinity of each agent. While such localized methods involve recomputation as agents move and may appear computationally demanding, we empirically demonstrate that supplying informative spatiotemporal cues to the planner can significantly improve solution quality without exceeding a moderate time budget. When applied to LaCAM, a leading configuration-based solver, this form of guidance establishes a new performance frontier for MAPF.