EmboMatrix: A Scalable Training-Ground for Embodied Decision-Making
作者: Zixing Lei, Sheng Yin, Yichen Xiong, Yuanzhuo Ding, Wenhao Huang, Yuxi Wei, Qingyao Xu, Yiming Li, Weixin Li, Yunhong Wang, Siheng Chen
分类: cs.AI, cs.RO
发布日期: 2025-10-14
备注: 10 pages 8 figures
💡 一句话要点
提出EmboMatrix:一个可扩展的具身决策训练平台,提升LLM的物理世界理解能力。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 具身决策 大型语言模型 强化学习 环境模拟 机器人
📋 核心要点
- 现有大型语言模型在具身决策方面存在不足,缺乏与物理环境的有效交互和理解。
- EmboMatrix通过构建大规模、多样化的具身交互环境,为LLM提供训练和学习的平台。
- 实验结果表明,基于EmboMatrix训练的EmboBrain在具身决策任务上显著优于现有模型。
📝 摘要(中文)
具身决策允许智能体通过与物理环境的持续交互,将高层次目标转化为可执行的动作,是通用具身智能的基石。大型语言模型(LLM)具有通用决策能力,为实现这一潜力提供了有希望的途径;然而,仅在语言上训练的LLM缺乏对物理环境的接触,限制了其真正的具身理解。为了弥合这一差距,我们提出了训练场的概念:一个提供任务和场景模拟、具身交互和反馈信号的综合基础设施,为LLM获得真正的具身决策技能提供一站式解决方案。在这项工作中,我们提出了EmboMatrix,这是第一个此类训练场,提供大规模和多样化的任务,具有高效的模拟和精确的奖励。EmboMatrix包含一系列新技术:用于大规模任务和场景生成的多智能体数据引擎,用于可扩展模拟的分布式异构硬件系统,以及用于精确监督的多级奖励架构。利用EmboMatrix,我们培养了EmboBrain,一个LLM,其具身决策能力源于广泛的具身交互。实验表明,EmboBrain-7B在两个具有挑战性的具身决策基准测试中,超过了671B DeepSeek-R1基线9.5%,证明了交互式、环境基础学习对于构建真正智能的具身智能体的力量。
🔬 方法详解
问题定义:论文旨在解决大型语言模型(LLM)在具身决策方面的不足。现有LLM主要在文本数据上训练,缺乏与物理环境的交互,导致其在实际物理世界中执行任务时表现不佳。痛点在于LLM难以将高层次的指令转化为具体的物理动作,缺乏对环境的感知和适应能力。
核心思路:论文的核心思路是构建一个大规模、多样化的具身决策训练环境,即EmboMatrix。通过让LLM在EmboMatrix中进行大量的交互式学习,使其能够更好地理解物理世界,并将语言指令转化为可执行的动作。这种方法类似于人类通过实践学习技能,强调环境交互的重要性。
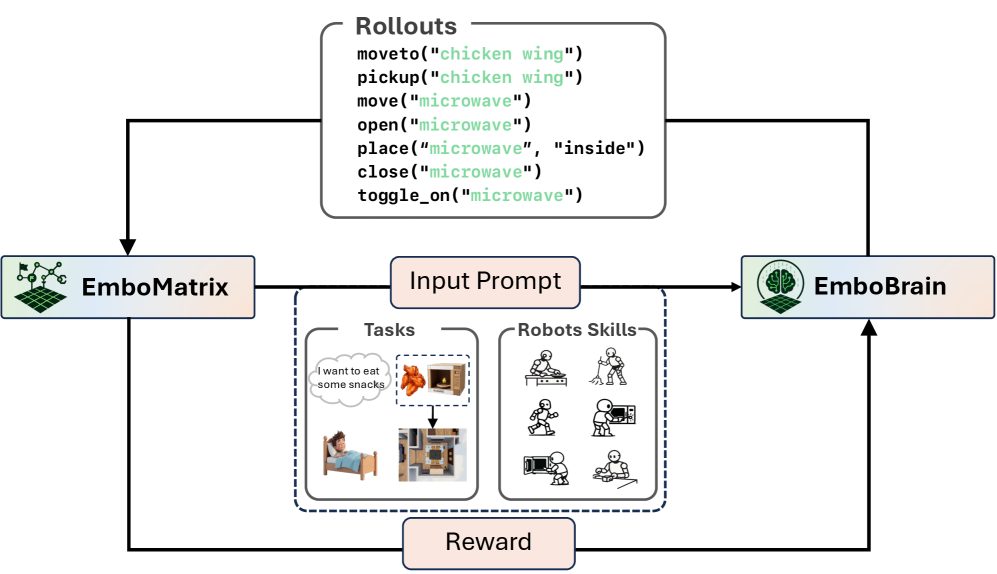
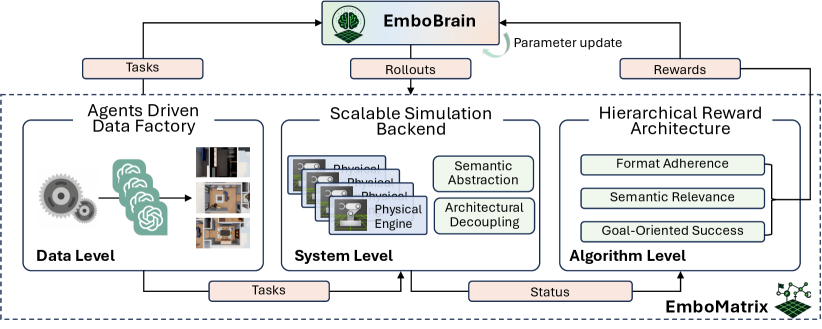
技术框架:EmboMatrix的整体架构包含三个主要模块:多智能体数据引擎、分布式异构硬件系统和多级奖励架构。多智能体数据引擎负责生成大规模的任务和场景数据;分布式异构硬件系统提供可扩展的模拟能力;多级奖励架构则为LLM提供精确的监督信号。LLM(EmboBrain)在EmboMatrix中与环境进行交互,根据环境反馈调整策略。
关键创新:EmboMatrix的关键创新在于其作为一个完整的具身决策训练平台,集成了任务生成、环境模拟和奖励反馈等多个环节。与以往的研究相比,EmboMatrix能够提供更大规模、更多样化的训练数据,并支持更高效的模拟和更精确的奖励。这种综合性的设计使得LLM能够更好地学习具身决策技能。
关键设计:EmboMatrix采用了多智能体数据引擎来生成任务和场景,保证了数据的多样性和规模。分布式异构硬件系统利用CPU和GPU的优势,实现了高效的模拟。多级奖励架构则根据任务的完成情况,提供不同层次的奖励信号,引导LLM学习正确的行为。
🖼️ 关键图片
📊 实验亮点
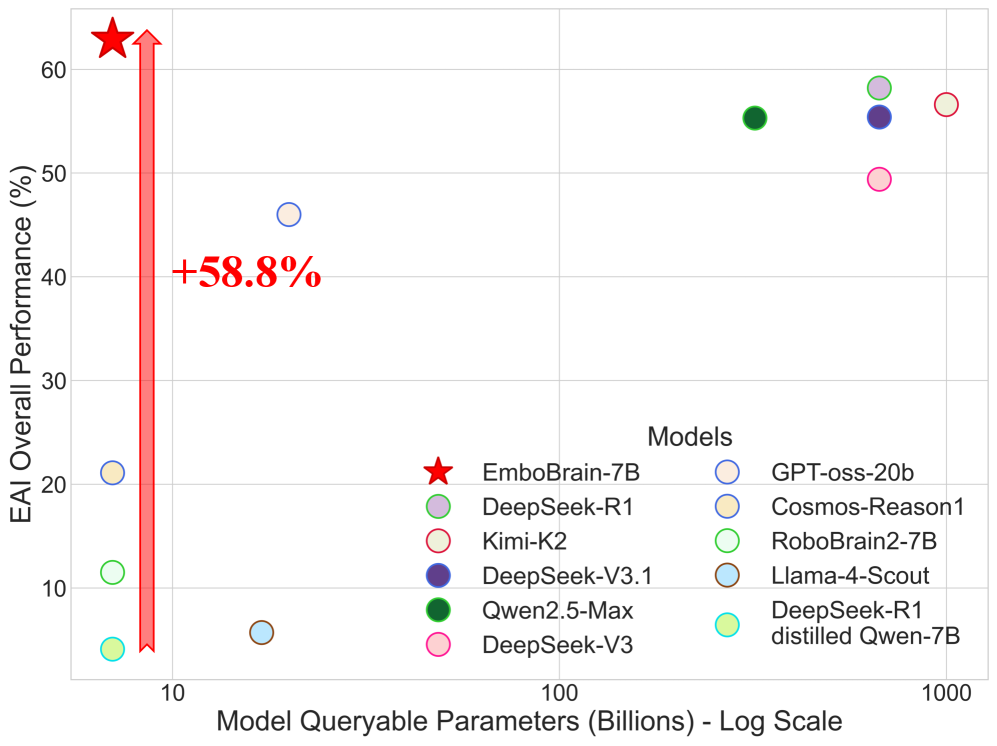
实验结果表明,基于EmboMatrix训练的EmboBrain-7B在两个具有挑战性的具身决策基准测试中,性能显著优于现有模型。具体而言,EmboBrain-7B超过了671B DeepSeek-R1基线9.5%,证明了交互式、环境基础学习对于构建真正智能的具身智能体的有效性。这一结果表明,EmboMatrix能够有效地提升LLM的具身决策能力。
🎯 应用场景
EmboMatrix的研究成果可应用于机器人控制、自动驾驶、智能家居等领域。通过训练具有强大具身决策能力的LLM,可以实现更智能、更自主的机器人系统,从而提高生产效率、改善生活质量。未来,EmboMatrix有望成为具身智能研究的重要基础设施,推动相关领域的发展。
📄 摘要(原文)
Embodied decision-making enables agents to translate high-level goals into executable actions through continuous interactions within the physical world, forming a cornerstone of general-purpose embodied intelligence. Large language models (LLMs), with their general decision-making capabilities, offer a promising path to realize this potential; however, LLMs trained solely on language lack exposure to physical environments, limiting their true embodied understanding. To bridge this gap, we propose the concept of a training ground: a comprehensive infrastructure that provides task and scene simulation, embodied interaction, and feedback signals, offering a one-stop solution for LLM acquire genuine embodied decision-making skills. In this work, we present EmboMatrix, the first training ground of its kind, providing massive and diverse tasks with efficient simulation and precise rewards. EmboMatrix incorporates a series of novel techniques: a multi-agent data engine for large-scale task and scene generation, a distributed heterogeneous-hardware system for scalable simulation, and a multi-level reward architecture for precise supervision. Leveraging EmboMatrix, we cultivate EmboBrain, an LLM whose embodied decision-making abilities emerge from extensive embodied interactions. Experiments show that EmboBrain-7B surpasses the 671B DeepSeek-R1 baseline by 9.5\% on two challenging embodied decision-making benchmarks, demonstrating the power of interactive, environment-grounded learning for building truly intelligent embodied agents.