ATLAS: Constraints-Aware Multi-Agent Collaboration for Real-World Travel Planning
作者: Jihye Choi, Jinsung Yoon, Jiefeng Chen, Somesh Jha, Tomas Pfister
分类: cs.AI, cs.CL
发布日期: 2025-09-29
💡 一句话要点
ATLAS:面向真实旅行规划的约束感知多智能体协作框架
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多智能体系统 约束感知 旅行规划 大型语言模型 实时信息搜索
📋 核心要点
- 现有LLM在复杂约束下进行真实世界规划时表现不足,尤其是在动态约束和多轮交互场景中。
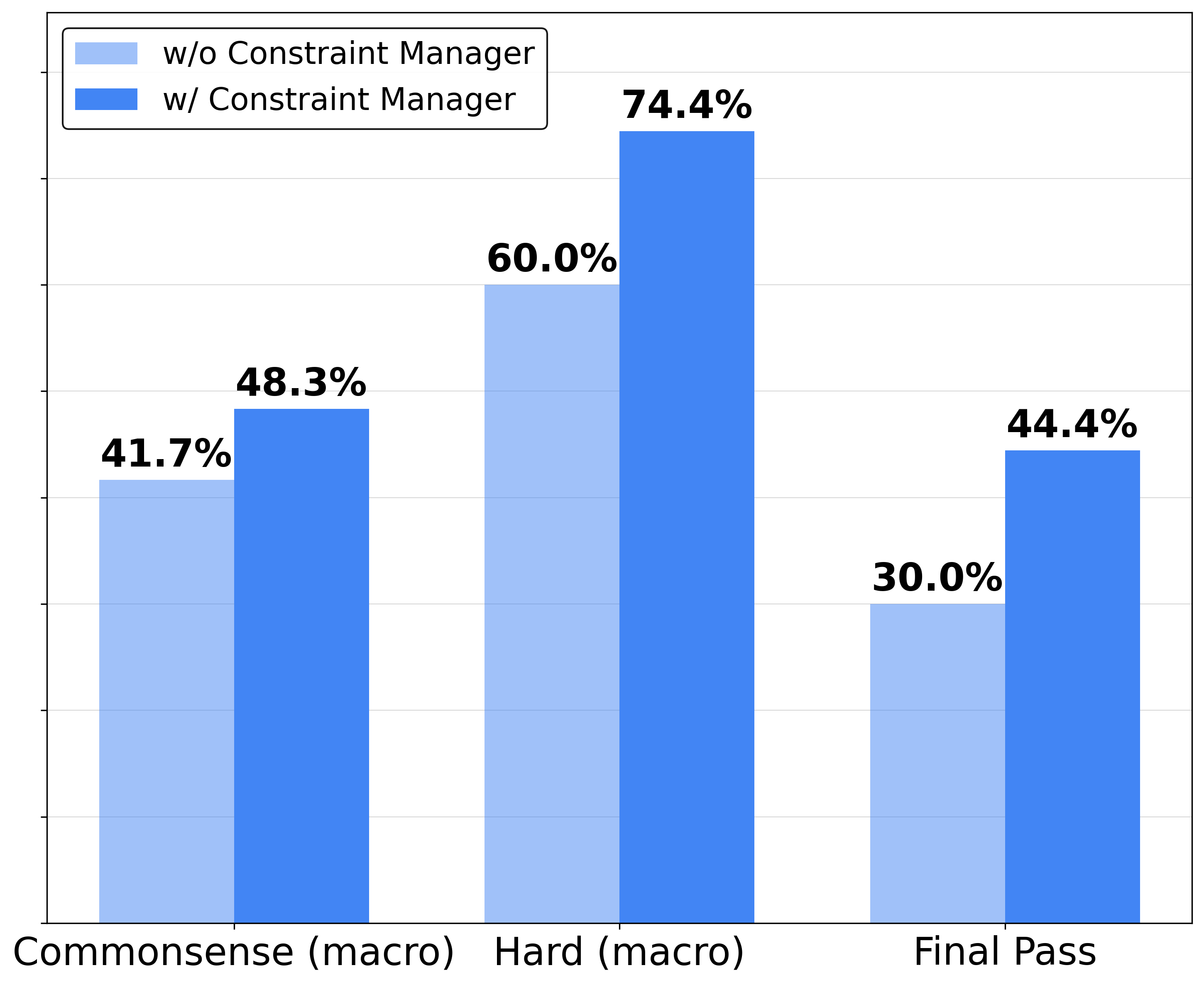
- ATLAS通过动态约束管理、迭代计划评估和自适应交错搜索,实现对复杂约束的有效处理。
- ATLAS在TravelPlanner基准测试和真实世界旅行规划任务中,显著优于现有方法,提升了规划成功率。
📝 摘要(中文)
大型语言模型(LLMs)在推理和工具使用方面表现出显著进步,但它们在复杂约束条件下生成最优、接地的解决方案时常常失败。现实世界的旅行规划就是一个例子,它评估了智能体处理显式、隐式以及基于与动态环境和用户需求交互而不断演变的约束的能力。本文提出了ATLAS,一个通用的多智能体框架,旨在有效处理现实世界旅行规划任务中这种复杂的约束感知特性。ATLAS引入了一种原则性的方法,通过动态约束管理、迭代计划评估和自适应交错搜索等专用机制来解决约束感知规划的根本挑战。ATLAS在TravelPlanner基准测试中表现出最先进的性能,将其最终通过率从最佳替代方案的23.3%提高到44.4%。更重要的是,我们的工作首次展示了在具有实时信息搜索和多轮反馈的真实世界旅行规划任务中的定量有效性。在这种现实环境中,ATLAS展示了其卓越的整体规划性能,实现了84%的最终通过率,显著优于包括ReAct(59%)和单体智能体(27%)在内的基线。
🔬 方法详解
问题定义:现实世界旅行规划涉及复杂的约束条件,包括显式约束(如预算、时间)、隐式约束(如偏好、习惯)以及动态约束(如实时交通、用户反馈)。现有方法,尤其是单体LLM,难以有效地管理和推理这些复杂的约束,导致规划结果不理想。
核心思路:ATLAS的核心思路是将复杂的旅行规划任务分解为多个智能体之间的协作,每个智能体负责不同的子任务,并通过约束感知的方式进行协调。这种分解能够更好地管理复杂性,并利用每个智能体的专业知识来优化规划结果。
技术框架:ATLAS框架包含以下主要模块:1) 动态约束管理器:负责维护和更新约束条件,包括显式、隐式和动态约束。2) 迭代计划评估器:负责评估当前计划的质量,并识别违反约束的地方。3) 自适应交错搜索器:负责在搜索空间中探索不同的计划,并根据评估结果进行调整。这些模块通过协作,共同完成旅行规划任务。
关键创新:ATLAS的关键创新在于其约束感知的多智能体协作机制。与传统的单体LLM方法不同,ATLAS能够显式地管理和推理约束条件,并在规划过程中动态地调整计划以满足这些约束。此外,ATLAS的自适应交错搜索策略能够有效地探索搜索空间,找到更优的解决方案。
关键设计:ATLAS的具体实现细节包括:1) 使用特定的数据结构来表示约束条件,并设计相应的算法来更新和查询约束。2) 设计评估函数来衡量计划的质量,并使用强化学习或监督学习来训练评估器。3) 使用蒙特卡洛树搜索或其他搜索算法来探索搜索空间,并根据评估结果进行剪枝和扩展。具体的参数设置和网络结构在论文中未详细说明,属于未知信息。
🖼️ 关键图片


📊 实验亮点
ATLAS在TravelPlanner基准测试中,最终通过率从23.3%提升到44.4%,显著优于现有方法。在真实世界旅行规划任务中,ATLAS的最终通过率达到84%,远超ReAct(59%)和单体智能体(27%)。这些实验结果表明,ATLAS在处理复杂约束和动态环境方面具有显著优势。
🎯 应用场景
ATLAS框架具有广泛的应用前景,不仅可以应用于旅行规划,还可以扩展到其他需要处理复杂约束的领域,如供应链管理、资源调度、项目管理等。该研究有助于提升AI在真实世界复杂问题中的决策能力,并为开发更智能、更可靠的自动化系统奠定基础。
📄 摘要(原文)
While Large Language Models (LLMs) have shown remarkable advancements in reasoning and tool use, they often fail to generate optimal, grounded solutions under complex constraints. Real-world travel planning exemplifies these challenges, evaluating agents' abilities to handle constraints that are explicit, implicit, and even evolving based on interactions with dynamic environments and user needs. In this paper, we present ATLAS, a general multi-agent framework designed to effectively handle such complex nature of constraints awareness in real-world travel planning tasks. ATLAS introduces a principled approach to address the fundamental challenges of constraint-aware planning through dedicated mechanisms for dynamic constraint management, iterative plan critique, and adaptive interleaved search. ATLAS demonstrates state-of-the-art performance on the TravelPlanner benchmark, improving the final pass rate from 23.3% to 44.4% over its best alternative. More importantly, our work is the first to demonstrate quantitative effectiveness on real-world travel planning tasks with live information search and multi-turn feedback. In this realistic setting, ATLAS showcases its superior overall planning performance, achieving an 84% final pass rate which significantly outperforms baselines including ReAct (59%) and a monolithic agent (27%).