ELHPlan: Efficient Long-Horizon Task Planning for Multi-Agent Collaboration
作者: Shaobin Ling, Yun Wang, Chenyou Fan, Tin Lun Lam, Junjie Hu
分类: cs.AI, cs.RO
发布日期: 2025-09-29
💡 一句话要点
ELHPlan:面向多智能体协作的高效长时程任务规划框架
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多智能体协作 长时程规划 大型语言模型 任务规划 动作链
📋 核心要点
- 现有基于LLM的多智能体协作方法,在适应性和计算效率上存在权衡,声明式方法缺乏适应性,迭代方法计算成本高昂。
- ELHPlan引入动作链作为基本规划单元,通过构建、验证、改进和执行的循环过程,平衡适应性和效率,避免完全重新规划。
- 实验表明,ELHPlan在保持任务成功率的同时,显著降低了token消耗,仅为现有方法的24%,提升了效率-效果边界。
📝 摘要(中文)
大型语言模型(LLMs)赋能了智能多机器人协作,但面临着根本性的权衡:声明式方法在动态环境中缺乏适应性,而迭代方法会产生过高的计算成本,且随着团队规模和任务复杂性的增加,其扩展性较差。本文提出了一种新颖的框架ELHPlan,它引入了动作链(Action Chains)——与子目标意图显式绑定的动作序列——作为基本的规划单元。ELHPlan通过一个循环过程运行:1)构建意图绑定的动作序列,2)主动验证冲突和可行性,3)通过有针对性的机制改进问题,以及4)执行经过验证的动作。这种设计通过提供足够的规划范围,同时避免昂贵的完全重新规划,从而平衡了适应性和效率。我们进一步提出了全面的效率指标,包括token消耗和规划时间,以更全面地评估多智能体协作。在基准TDW-MAT和C-WAH上的实验表明,ELHPlan在实现相当的任务成功率的同时,仅消耗最先进方法所需的24%的token。我们的研究为基于LLM的多智能体规划系统建立了一个新的效率-效果前沿。
🔬 方法详解
问题定义:论文旨在解决多智能体协作中,基于大型语言模型(LLM)的任务规划问题。现有方法,如声明式方法,难以适应动态环境;而迭代式方法,计算复杂度高,难以扩展到大规模智能体和复杂任务。因此,如何在保证任务成功率的前提下,提高LLM在多智能体任务规划中的效率,是本文要解决的核心问题。
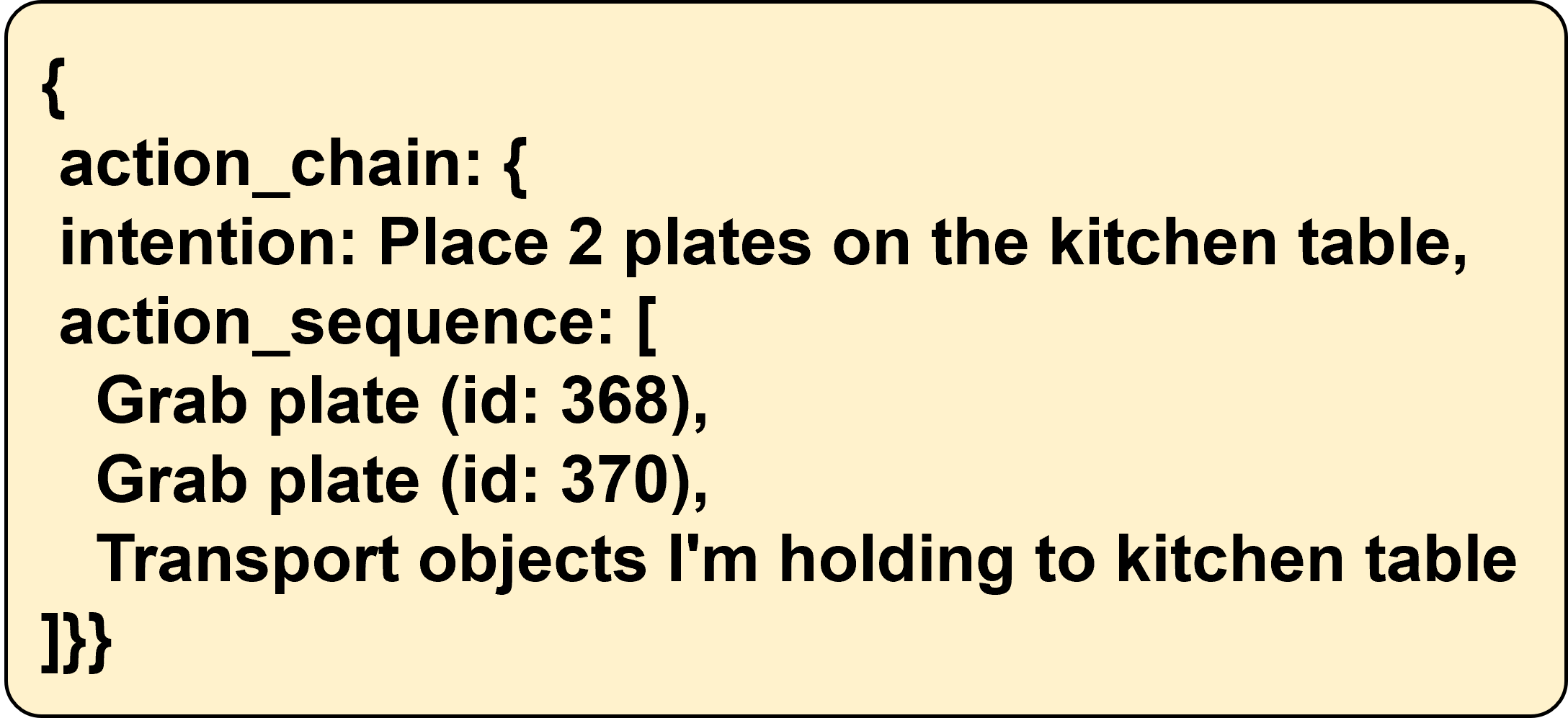
核心思路:论文的核心思路是引入“动作链”(Action Chains)作为基本的规划单元。动作链是将一系列动作与特定的子目标意图绑定,从而在规划过程中,能够更有效地利用LLM的推理能力,并减少不必要的计算。通过显式地将动作与意图关联,可以更容易地检测和解决潜在的冲突,并提高规划的效率。
技术框架:ELHPlan的整体框架是一个循环过程,包含四个主要阶段:1) 构建(Construction):根据任务目标和当前环境状态,利用LLM生成与子目标意图绑定的动作链。2) 验证(Validation):主动检测生成的动作链是否存在冲突或不可行的情况。3) 改进(Refinement):针对检测到的问题,利用LLM进行有针对性的改进,例如调整动作序列或重新规划部分动作。4) 执行(Execution):执行经过验证的动作链。这个循环过程持续进行,直到完成整个任务。
关键创新:ELHPlan的关键创新在于引入了“动作链”这一概念,并将其作为基本的规划单元。与传统的将每个动作视为独立单元的方法不同,动作链将一系列动作与特定的意图绑定,从而提高了规划的效率和可控性。此外,ELHPlan还提出了主动验证和有针对性的改进机制,进一步提高了规划的鲁棒性和适应性。
关键设计:ELHPlan的关键设计包括:1) 动作链的表示方式,需要能够清晰地表达动作序列和对应的意图。2) 冲突检测和可行性验证的算法,需要能够有效地识别潜在的问题。3) 改进机制的设计,需要能够针对不同的问题,选择合适的改进策略。4) 效率评估指标,包括token消耗和规划时间,用于全面评估多智能体协作的效率。
🖼️ 关键图片


📊 实验亮点
实验结果表明,ELHPlan在TDW-MAT和C-WAH基准测试中,实现了与最先进方法相当的任务成功率,同时显著降低了token消耗,仅为现有方法的24%。这表明ELHPlan在效率和效果之间取得了更好的平衡,为基于LLM的多智能体规划系统开辟了新的方向。此外,论文还提出了全面的效率指标,为评估多智能体协作系统提供了新的视角。
🎯 应用场景
ELHPlan具有广泛的应用前景,例如在仓库自动化、智能交通、灾难救援等领域,可以用于协调多个机器人或智能体完成复杂的任务。通过提高规划效率和适应性,ELHPlan可以降低多智能体系统的部署和维护成本,并提高其在动态环境中的表现。未来,ELHPlan可以进一步扩展到更复杂的任务和更大规模的智能体团队。
📄 摘要(原文)
Large Language Models (LLMs) enable intelligent multi-robot collaboration but face fundamental trade-offs: declarative methods lack adaptability in dynamic environments, while iterative methods incur prohibitive computational costs that scale poorly with team size and task complexity. In this paper, we propose ELHPlan, a novel framework that introduces Action Chains--sequences of actions explicitly bound to sub-goal intentions--as the fundamental planning primitive. ELHPlan operates via a cyclical process: 1) constructing intention-bound action sequences, 2) proactively validating for conflicts and feasibility, 3) refining issues through targeted mechanisms, and 4) executing validated actions. This design balances adaptability and efficiency by providing sufficient planning horizons while avoiding expensive full re-planning. We further propose comprehensive efficiency metrics, including token consumption and planning time, to more holistically evaluate multi-agent collaboration. Our experiments on benchmark TDW-MAT and C-WAH demonstrate that ELHPlan achieves comparable task success rates while consuming only 24% of the tokens required by state-of-the-art methods. Our research establishes a new efficiency-effectiveness frontier for LLM-based multi-agent planning systems.