Transferring Vision-Language-Action Models to Industry Applications: Architectures, Performance, and Challenges
作者: Shuai Li, Chen Yizhe, Li Dong, Liu Sichao, Lan Dapeng, Liu Yu, Zhibo Pang
分类: cs.AI
发布日期: 2025-09-27
备注: Accepted to IAI 2025 (International Conference on Industrial Artificial Intelligence), Shenyang, China, Aug 21 - 24, 2025. Preprint (before IEEE copyright transfer)
💡 一句话要点
评估并改进视觉-语言-动作模型在工业场景的应用性能
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 视觉-语言-动作模型 工业应用 机器人操作 性能评估 迁移学习 智能制造 自动化
📋 核心要点
- 现有VLA模型在复杂工业环境、多样物体类别和高精度放置任务中表现不足,限制了其工业应用。
- 通过分析数据收集和模型架构的局限性,探索VLA模型在工业场景中的适应性,并提出改进方向。
- 实验表明,VLA模型经过微调后可在工业环境中执行简单抓取任务,但复杂任务仍需进一步优化。
📝 摘要(中文)
本文从工业部署的角度出发,评估了现有最先进的视觉-语言-动作(VLA)模型在工业场景中的性能,并从数据收集和模型架构的角度分析了VLA模型在实际工业部署中的局限性。结果表明,VLA模型经过微调后,在工业环境中仍然能够执行简单的抓取任务。然而,在复杂的工业环境、多样化的物体类别和高精度放置任务中,VLA模型的性能仍有很大的提升空间。研究结果为VLA模型在工业应用中的适应性提供了实践性的见解,并强调需要进行特定于任务的增强,以提高其鲁棒性、泛化性和精度。
🔬 方法详解
问题定义:论文旨在解决视觉-语言-动作(VLA)模型在工业场景中应用时,由于环境复杂、物体多样、精度要求高等因素导致的性能瓶颈问题。现有方法在泛化性、鲁棒性和精度方面存在不足,难以满足实际工业需求。
核心思路:论文的核心思路是从工业部署的角度出发,对现有VLA模型进行评估,分析其在工业场景中的局限性,并为后续改进提供方向。通过对比实验,揭示VLA模型在不同工业任务中的表现,从而指导模型优化和任务特定增强。
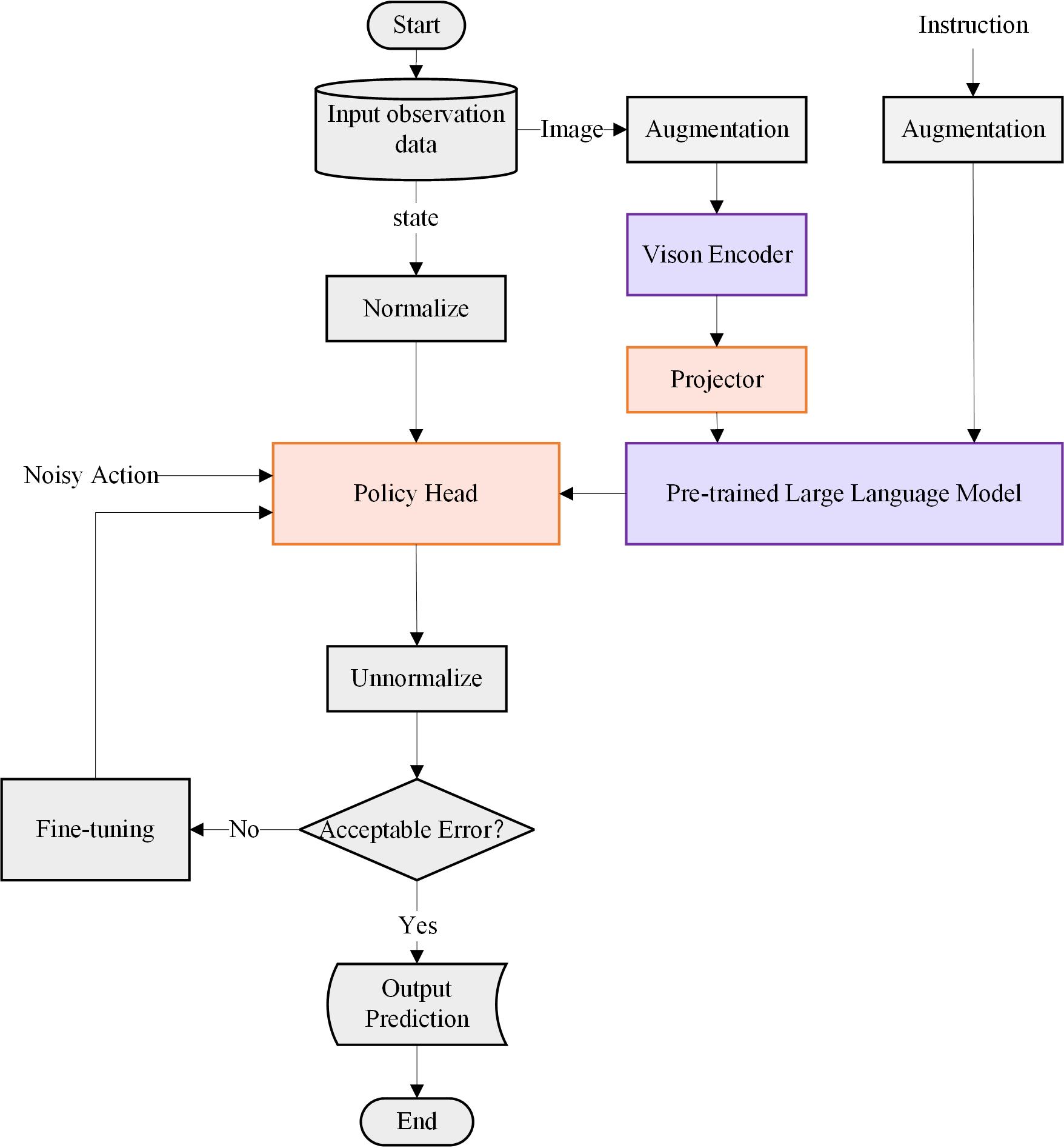
技术框架:论文采用实验评估的方法,首先选择代表性的VLA模型,然后在工业场景中进行微调和测试。评估过程涉及数据收集、模型训练、性能测试和结果分析等环节。重点关注模型在抓取、放置等典型工业任务中的表现,并分析影响性能的关键因素。
关键创新:论文的关键创新在于从工业部署的视角评估VLA模型,并针对性地分析其局限性。不同于以往侧重于模型架构或算法的改进,本文更关注模型在实际应用中的表现,为VLA模型在工业领域的应用提供了实践指导。
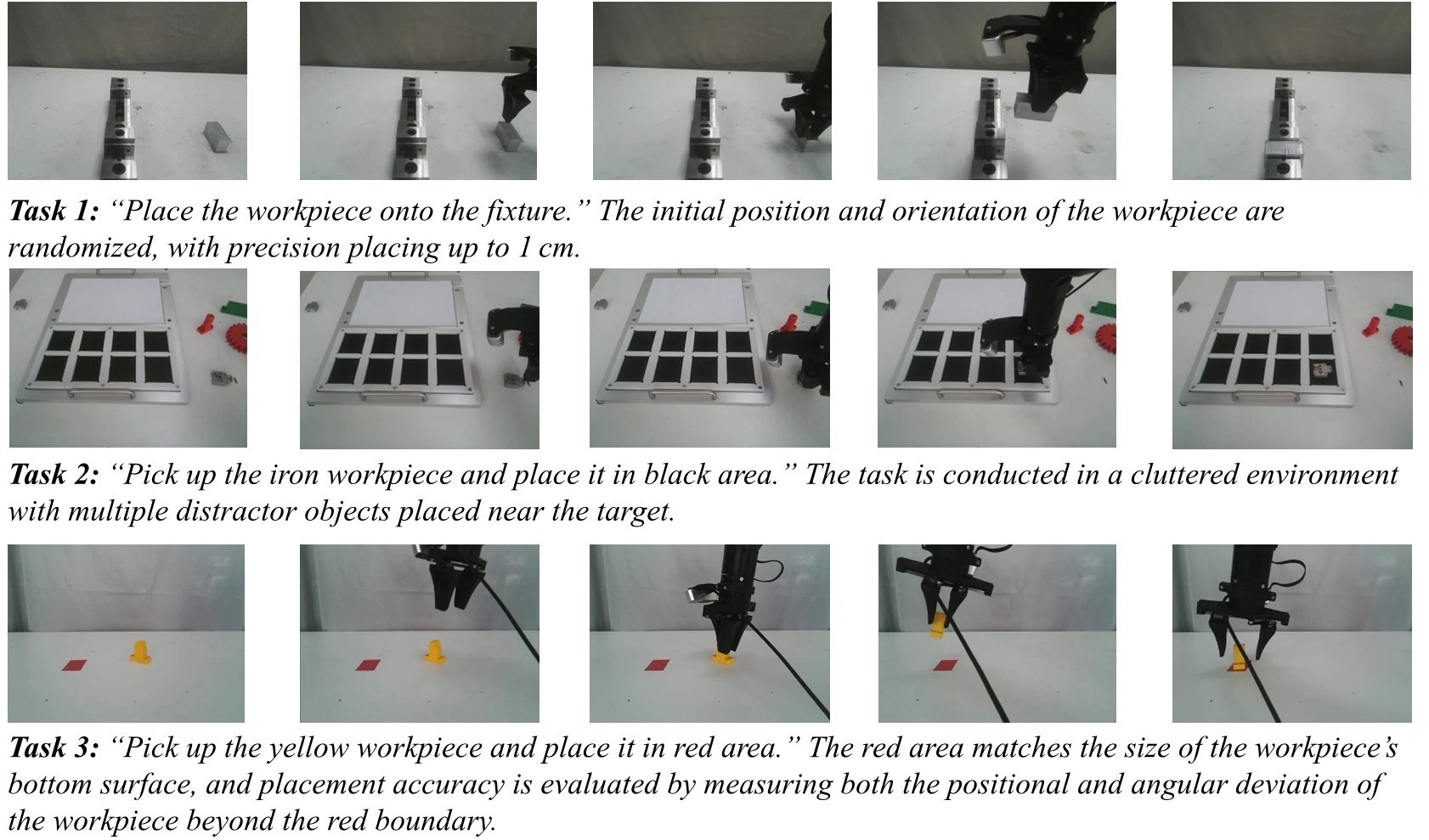
关键设计:论文的关键设计包括:1) 选择具有代表性的工业场景和任务;2) 构建包含多样化物体和复杂环境的数据集;3) 设计合理的评估指标,如抓取成功率、放置精度等;4) 分析模型在不同任务中的表现,并找出影响性能的关键因素,例如数据质量、模型复杂度、训练策略等。
🖼️ 关键图片
📊 实验亮点
实验结果表明,经过微调的VLA模型在工业环境中能够完成简单的抓取任务,但性能与理想水平仍有差距。在复杂环境中,VLA模型的抓取成功率和放置精度显著下降。此外,模型对新物体的泛化能力有限,需要更多的数据进行训练。这些结果为后续研究提供了重要的参考依据。
🎯 应用场景
该研究成果可应用于智能制造、自动化生产线、机器人操作等领域。通过改进VLA模型在工业场景中的性能,可以提高生产效率、降低人工成本、提升产品质量。未来的研究可以进一步探索如何利用VLA模型实现更复杂的工业任务,例如装配、检测、维护等,从而推动工业智能化发展。
📄 摘要(原文)
The application of artificial intelligence (AI) in industry is accelerating the shift from traditional automation to intelligent systems with perception and cognition. Vision language-action (VLA) models have been a key paradigm in AI to unify perception, reasoning, and control. Has the performance of the VLA models met the industrial requirements? In this paper, from the perspective of industrial deployment, we compare the performance of existing state-of-the-art VLA models in industrial scenarios and analyze the limitations of VLA models for real-world industrial deployment from the perspectives of data collection and model architecture. The results show that the VLA models retain their ability to perform simple grasping tasks even in industrial settings after fine-tuning. However, there is much room for performance improvement in complex industrial environments, diverse object categories, and high precision placing tasks. Our findings provide practical insight into the adaptability of VLA models for industrial use and highlight the need for task-specific enhancements to improve their robustness, generalization, and precision.