Hybrid Reinforcement Learning and Search for Flight Trajectory Planning
作者: Alberto Luise, Michele Lombardi, Florent Teichteil Koenigsbuch
分类: cs.AI
发布日期: 2025-09-04
💡 一句话要点
结合强化学习与搜索算法,加速飞行轨迹规划,提升紧急情况下的航线重算速度。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 飞行轨迹规划 强化学习 路径规划 搜索算法 航线优化
📋 核心要点
- 现有飞行路径规划方法在紧急情况下重新计算航线速度慢,难以满足实时性要求。
- 利用强化学习预计算近优路径,约束搜索空间,加速求解器寻找可行解。
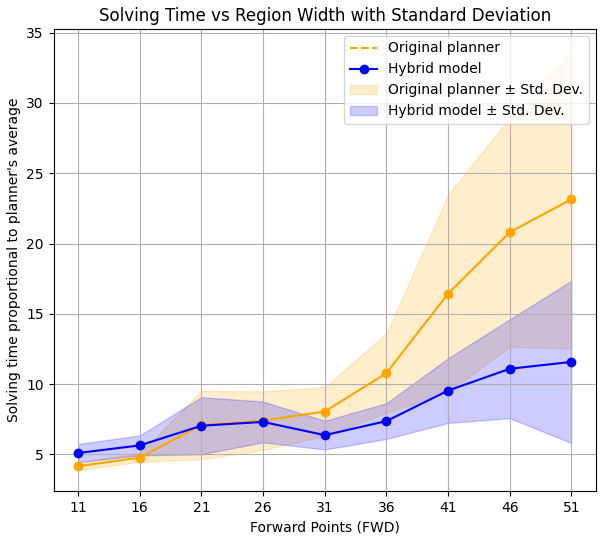
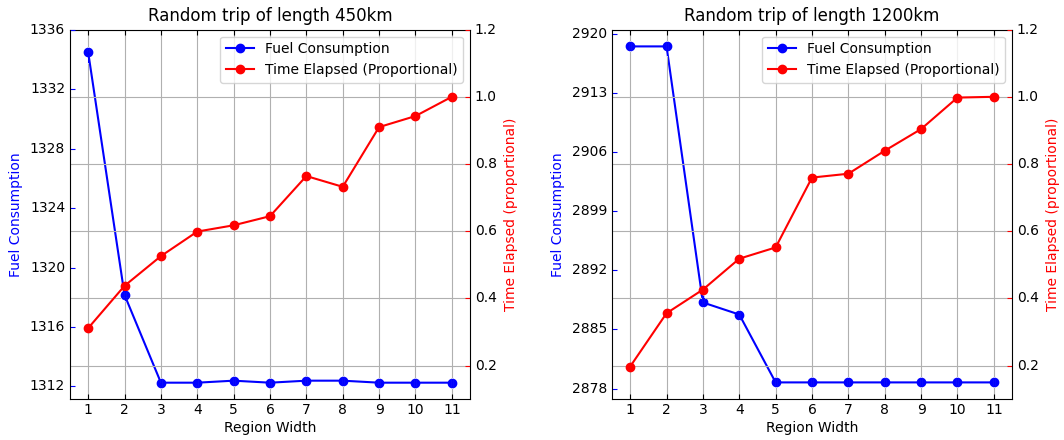
- 实验表明,该方法在燃料消耗几乎不变的情况下,计算速度提升高达50%。
📝 摘要(中文)
本文探索了强化学习(RL)与基于搜索的路径规划器相结合的方法,旨在加速客机飞行路径的优化,尤其是在紧急情况下快速重新计算航线至关重要。核心思想是训练一个强化学习智能体,基于位置和大气数据预先计算出接近最优的路径,并在运行时利用这些路径来约束底层的路径规划求解器,从而在与初始猜测路径一定距离内找到解决方案。该方法有效地减小了求解器的搜索空间,显著加快了航线优化速度。虽然不能保证全局最优性,但使用空客飞机性能模型进行的实验结果表明,燃料消耗与无约束求解器几乎相同,偏差通常在1%以内。同时,与单独使用传统求解器相比,计算速度可以提高高达50%。
🔬 方法详解
问题定义:论文旨在解决飞行轨迹规划中,尤其是在紧急情况下,快速重新计算航线的问题。传统路径规划方法计算量大,耗时较长,难以满足实时性要求。现有方法的痛点在于搜索空间过大,导致求解速度慢。
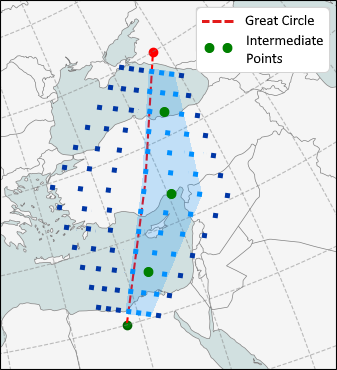
核心思路:论文的核心思路是利用强化学习(RL)预先学习一个策略,该策略能够根据当前位置和大气数据预测出一条接近最优的飞行路径。然后,将这条RL预测的路径作为约束条件,缩小传统路径规划求解器的搜索空间。
技术框架:该方法包含两个主要阶段:离线训练阶段和在线规划阶段。在离线训练阶段,训练一个强化学习智能体,使其能够根据位置和大气数据预测近优路径。在在线规划阶段,首先使用训练好的RL智能体生成一条初始路径,然后使用传统的路径规划求解器,但在求解过程中,搜索空间被限制在初始路径附近。
关键创新:该方法最重要的创新点在于将强化学习的快速预测能力与传统路径规划的精确优化能力相结合。与单独使用传统路径规划方法相比,该方法能够显著减小搜索空间,从而加速求解过程。与完全依赖强化学习的方法相比,该方法能够利用传统路径规划的优化能力,保证解的质量。
关键设计:论文中强化学习智能体的具体网络结构、奖励函数以及训练算法等关键设计细节未明确给出。路径规划求解器如何利用RL预测的路径进行约束,例如设置距离阈值等,也未详细说明。这些细节将直接影响最终的性能。
🖼️ 关键图片
📊 实验亮点
实验结果表明,与单独使用传统求解器相比,该方法在燃料消耗几乎不变(偏差通常在1%以内)的情况下,计算速度可以提高高达50%。这表明该方法能够在保证飞行性能的同时,显著提升航线规划的效率。
🎯 应用场景
该研究成果可应用于航空交通管理系统,提升飞行安全性和效率。在紧急情况下,例如遭遇恶劣天气或机械故障时,该方法能够快速生成备选航线,为飞行员提供决策支持。此外,该方法还可用于优化日常飞行计划,降低燃油消耗,减少碳排放。
📄 摘要(原文)
This paper explores the combination of Reinforcement Learning (RL) and search-based path planners to speed up the optimization of flight paths for airliners, where in case of emergency a fast route re-calculation can be crucial. The fundamental idea is to train an RL Agent to pre-compute near-optimal paths based on location and atmospheric data and use those at runtime to constrain the underlying path planning solver and find a solution within a certain distance from the initial guess. The approach effectively reduces the size of the solver's search space, significantly speeding up route optimization. Although global optimality is not guaranteed, empirical results conducted with Airbus aircraft's performance models show that fuel consumption remains nearly identical to that of an unconstrained solver, with deviations typically within 1%. At the same time, computation speed can be improved by up to 50% as compared to using a conventional solver alone.