Controlling Topological Defects in Polar Fluids via Reinforcement Learning
作者: Abhinav Singh, Petros Koumoutsakos
分类: cond-mat.soft, cs.AI, cs.LG
发布日期: 2025-07-25
💡 一句话要点
利用强化学习控制极性流体中的拓扑缺陷
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 活性流体 拓扑缺陷 强化学习 闭环控制 流体动力学
📋 核心要点
- 活性极性流体中的拓扑缺陷控制复杂,现有方法难以有效引导系统在不同动态状态间转换。
- 通过强化学习,论文提出了一种闭环控制策略,通过调节活性空间分布来引导和控制拓扑缺陷。
- 实验表明,该方法能够学习潜在动力学,实现缺陷在训练和新轨迹上的鲁棒传输,为活性物质控制提供新思路。
📝 摘要(中文)
活性极性流体中的拓扑缺陷表现出复杂的动力学行为,这种行为由内部产生的应力驱动,反映了拓扑学、流动和非平衡流体动力学之间的深刻相互作用。反馈控制提供了一种强大的手段来引导此类系统,从而实现动态状态之间的转换。本文研究了通过调节活性的空间分布来闭环控制受限活性流体中的整数电荷缺陷。使用连续流体动力学模型,结果表明活性应力的局部控制会产生流动场,通过利用系统中的非线性耦合,可以重新定位缺陷并将其引导到预定的轨迹上。强化学习框架用于发现有效的控制策略,从而在训练的和新的轨迹上产生鲁棒的缺陷传输。研究结果强调了人工智能体如何学习潜在的动力学并空间结构化活性以操纵拓扑激发,从而为了解活性物质的可控性和自适应自组织材料的设计提供了见解。
🔬 方法详解
问题定义:论文旨在解决活性极性流体中拓扑缺陷的精确控制问题。现有方法,如直接施加外部力场,可能难以实现对缺陷的精细化操控,尤其是在复杂流体环境中。痛点在于如何设计一种能够有效利用流体自身动力学特性,并能适应不同运动轨迹的控制策略。
核心思路:论文的核心思路是利用强化学习来学习一种最优的活性空间分布策略,通过局部控制活性应力,诱导流体产生特定的流动场,从而实现对拓扑缺陷的精确引导和控制。这种方法的核心在于利用了活性流体中的非线性耦合效应,通过微小的活性变化来产生显著的流动响应。
技术框架:整体框架包括以下几个主要模块:1) 活性流体的连续介质模型,用于模拟流体的动力学行为;2) 强化学习智能体,负责学习最优的活性控制策略;3) 环境模拟器,基于流体模型,模拟在不同活性控制下的流体演化过程,并为智能体提供奖励信号。智能体通过与环境的交互,不断优化控制策略。
关键创新:最重要的技术创新在于将强化学习与活性流体控制相结合,利用智能体自主学习流体动力学特性,并发现有效的控制策略。与传统的基于模型预测控制的方法相比,该方法无需精确的流体动力学模型,具有更强的适应性和鲁棒性。
关键设计:论文中,强化学习智能体采用Actor-Critic结构,Actor网络负责输出活性控制策略,Critic网络负责评估当前策略的价值。奖励函数的设计至关重要,需要综合考虑缺陷的运动轨迹、控制能量消耗等因素。具体而言,奖励函数可能包含以下几项:缺陷与目标轨迹的距离、控制活性的大小、以及控制过程的平滑性。网络结构和超参数的选择需要根据具体问题进行调整。
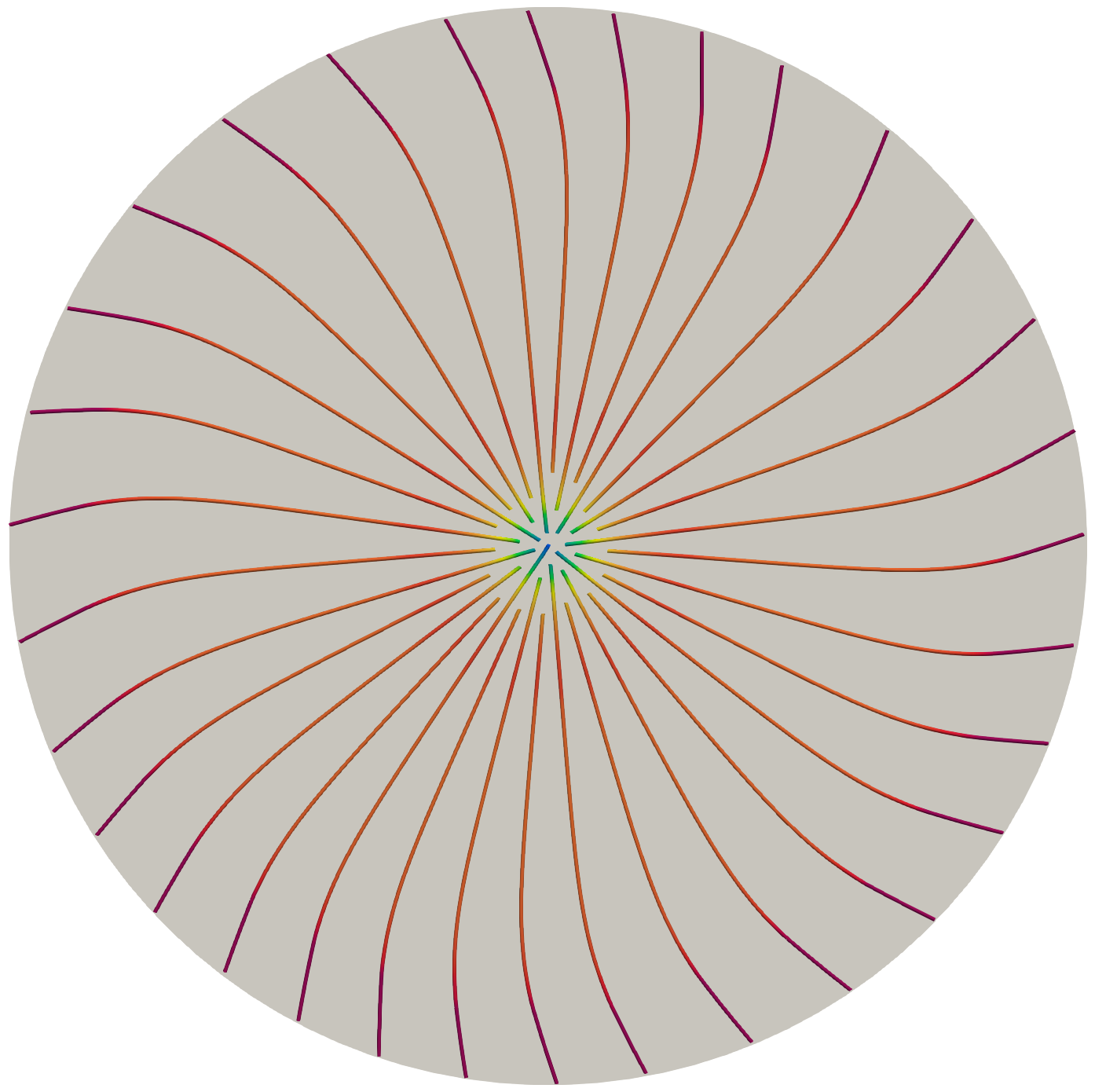
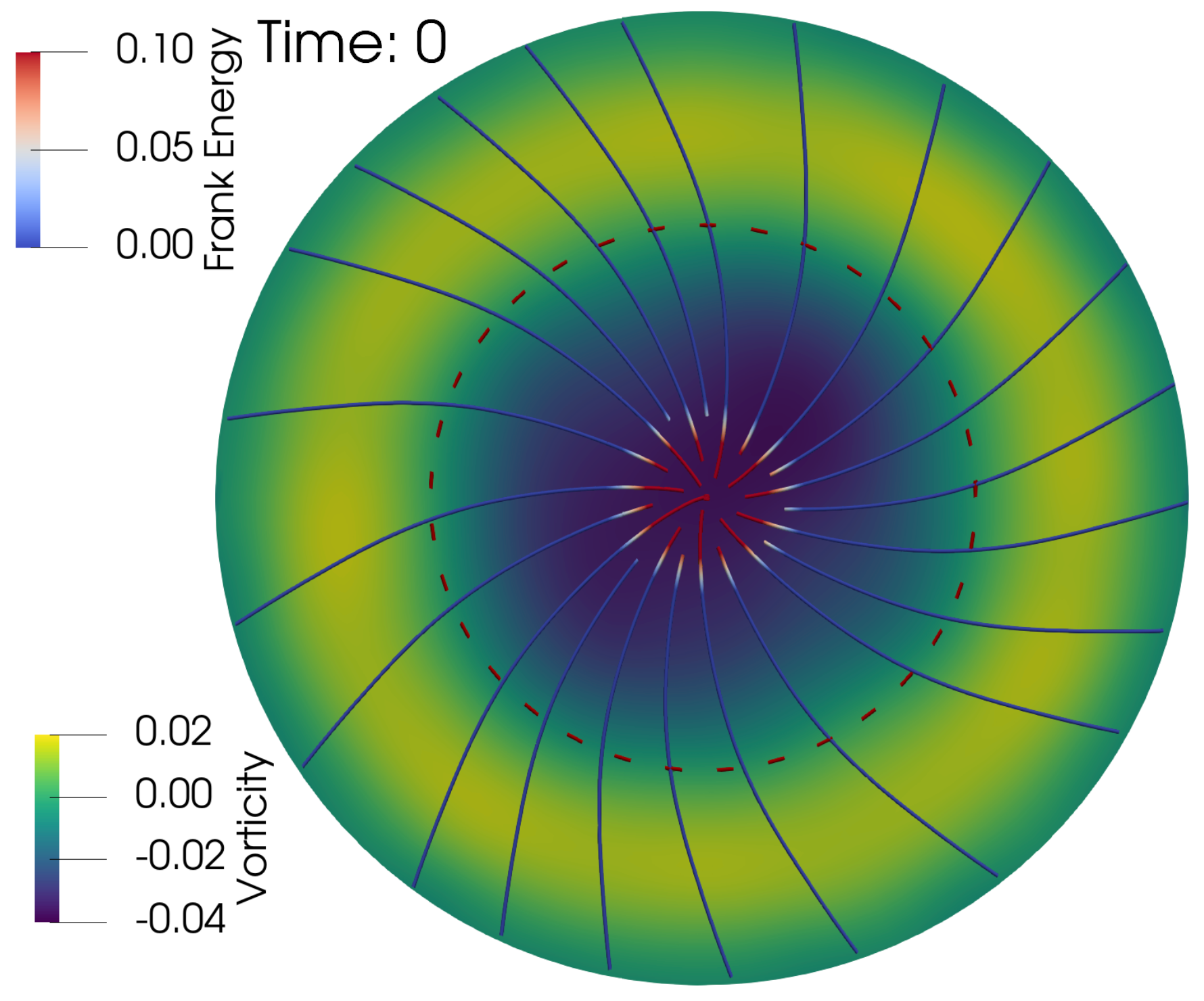
🖼️ 关键图片

📊 实验亮点
论文通过实验验证了强化学习控制策略的有效性,结果表明,该方法能够成功引导拓扑缺陷沿预定轨迹运动,即使在面对未训练过的轨迹时,也能表现出良好的泛化能力。具体而言,智能体能够学习到一种能够有效利用流体动力学特性的控制策略,实现对缺陷的精确控制,并且控制过程具有较高的鲁棒性。
🎯 应用场景
该研究成果可应用于设计自适应、自组织材料,例如,开发能够响应外部刺激进行自我修复或改变形状的智能材料。此外,该方法还可用于微流控器件的设计,实现对微小颗粒或细胞的精确操控,在生物医学工程领域具有潜在应用价值。未来,该研究有望推动活性物质控制领域的发展,为新型功能材料的开发提供理论指导。
📄 摘要(原文)
Topological defects in active polar fluids exhibit complex dynamics driven by internally generated stresses, reflecting the deep interplay between topology, flow, and non-equilibrium hydrodynamics. Feedback control offers a powerful means to guide such systems, enabling transitions between dynamic states. We investigated closed-loop steering of integer-charged defects in a confined active fluid by modulating the spatial profile of activity. Using a continuum hydrodynamic model, we show that localized control of active stress induces flow fields that can reposition and direct defects along prescribed trajectories by exploiting non-linear couplings in the system. A reinforcement learning framework is used to discover effective control strategies that produce robust defect transport across both trained and novel trajectories. The results highlight how AI agents can learn the underlying dynamics and spatially structure activity to manipulate topological excitations, offering insights into the controllability of active matter and the design of adaptive, self-organized materials.