HyperTree Planning: Enhancing LLM Reasoning via Hierarchical Thinking
作者: Runquan Gui, Zhihai Wang, Jie Wang, Chi Ma, Huiling Zhen, Mingxuan Yuan, Jianye Hao, Defu Lian, Enhong Chen, Feng Wu
分类: cs.AI
发布日期: 2025-05-05 (更新: 2025-05-29)
备注: arXiv admin note: text overlap with arXiv:2406.14228 by other authors
💡 一句话要点
提出HyperTree Planning,通过层级思考增强LLM在复杂规划任务中的推理能力
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 大型语言模型 复杂规划 层级推理 超树结构 分而治之
📋 核心要点
- 现有LLM在复杂规划任务中面临推理步骤长、约束多样、子任务多的挑战。
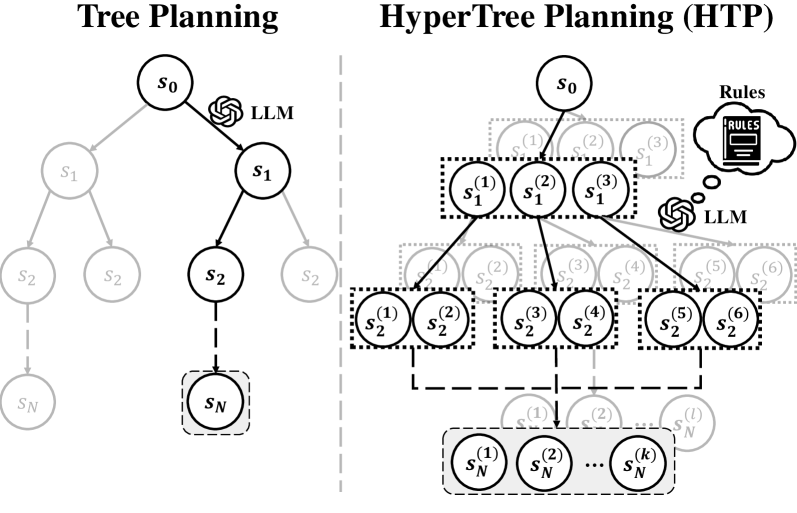
- HyperTree Planning通过构建超树结构规划大纲,使LLM进行层级思考,分而治之。
- 实验表明,HTP在TravelPlanner基准测试中达到SOTA,性能提升显著。
📝 摘要(中文)
本文提出了一种新的推理范式HyperTree Planning (HTP),旨在提升大型语言模型(LLM)在复杂规划任务中的性能。现有方法在处理复杂规划任务时面临挑战,主要由于推理步骤过长、约束条件多样以及需要处理多个不同的子任务。HTP通过构建超树结构的规划大纲来实现有效的规划,使LLM能够灵活地采用分而治之的策略进行层级思考,从而有效地分解复杂的推理步骤,适应不同的约束条件,并以有组织的方式管理多个不同的子任务。此外,本文还提出了一个自主规划框架,通过迭代地细化和扩展超树结构的规划大纲来完成规划过程。实验结果表明,HTP是有效的,在TravelPlanner基准测试中,使用Gemini-1.5-Pro达到了最先进的准确率,相比o1-preview性能提升了3.6倍。
🔬 方法详解
问题定义:论文旨在解决大型语言模型(LLM)在复杂规划任务中表现不佳的问题。现有方法难以处理推理步骤过长、约束条件多样以及需要同时管理多个子任务的情况,导致规划效率和准确性下降。这些痛点限制了LLM在实际规划场景中的应用。
核心思路:论文的核心思路是引入超树(hypertree)结构来组织规划过程。超树允许将复杂的规划任务分解为多个层级的子任务,每个子任务可以进一步分解,从而实现分而治之。这种层级结构使得LLM能够更好地管理复杂的约束条件和多个子任务,并逐步细化规划方案。通过层级思考,LLM可以更有效地探索和优化规划路径。
技术框架:HTP框架包含以下主要阶段:1) 初始化:根据任务目标生成初始的超树结构。2) 迭代细化:LLM根据当前超树结构,逐步细化每个节点的规划方案,并扩展超树结构,增加新的子任务或约束。3) 评估与选择:对不同的规划方案进行评估,选择最优方案。4) 终止:当满足终止条件(例如达到最大迭代次数或找到可行的解决方案)时,停止迭代。
关键创新:HTP的关键创新在于引入了超树结构来表示规划大纲,并结合LLM的推理能力进行迭代细化。与传统的线性规划或平面规划方法不同,超树结构能够更好地表达任务之间的依赖关系和层级关系,从而实现更灵活和高效的规划。此外,HTP框架还引入了自主规划机制,允许LLM在没有人工干预的情况下完成规划过程。
关键设计:超树的节点表示一个子任务或约束,边表示任务之间的依赖关系。LLM被用于生成和评估每个节点的规划方案,并根据评估结果调整超树结构。论文中可能还涉及一些关键的参数设置,例如迭代次数、评估指标等,但具体细节未知。
🖼️ 关键图片


📊 实验亮点
实验结果表明,HyperTree Planning在TravelPlanner基准测试中取得了显著的性能提升。使用Gemini-1.5-Pro模型,HTP达到了最先进的准确率,相比o1-preview模型,性能提升了3.6倍。这一结果验证了HTP在复杂规划任务中的有效性,并表明其具有超越现有方法的潜力。
🎯 应用场景
HyperTree Planning具有广泛的应用前景,例如智能交通规划、供应链管理、项目管理、机器人路径规划等。该方法可以帮助LLM更好地理解和解决复杂的现实世界问题,提高自动化决策的效率和质量,并有望在智能助理、自动驾驶等领域发挥重要作用。
📄 摘要(原文)
Recent advancements have significantly enhanced the performance of large language models (LLMs) in tackling complex reasoning tasks, achieving notable success in domains like mathematical and logical reasoning. However, these methods encounter challenges with complex planning tasks, primarily due to extended reasoning steps, diverse constraints, and the challenge of handling multiple distinct sub-tasks. To address these challenges, we propose HyperTree Planning (HTP), a novel reasoning paradigm that constructs hypertree-structured planning outlines for effective planning. The hypertree structure enables LLMs to engage in hierarchical thinking by flexibly employing the divide-and-conquer strategy, effectively breaking down intricate reasoning steps, accommodating diverse constraints, and managing multiple distinct sub-tasks in a well-organized manner. We further introduce an autonomous planning framework that completes the planning process by iteratively refining and expanding the hypertree-structured planning outlines. Experiments demonstrate the effectiveness of HTP, achieving state-of-the-art accuracy on the TravelPlanner benchmark with Gemini-1.5-Pro, resulting in a 3.6 times performance improvement over o1-preview.