Leveraging LLM Agents and Digital Twins for Fault Handling in Process Plants
作者: Milapji Singh Gill, Javal Vyas, Artan Markaj, Felix Gehlhoff, Mehmet Mercangöz
分类: cs.AI, cs.MA
发布日期: 2025-05-04
💡 一句话要点
利用LLM Agent和数字孪生解决流程工厂的故障处理问题
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 大型语言模型 数字孪生 流程工厂 故障处理 自主控制
📋 核心要点
- 流程工厂的故障处理依赖人工经验,缺乏系统性知识方法,是当前自动化水平提升的瓶颈。
- 该论文提出将LLM Agent与数字孪生环境结合,利用LLM理解系统状态并执行控制动作。
- 实验表明,该框架能够自主控制混合模块,并通过少量重新提示有效缓解管道堵塞问题。
📝 摘要(中文)
自动化和人工智能的进步不断提升流程工厂在处理各种运行场景中的自主性。然而,诸如故障处理等任务仍然具有挑战性,因为它们在很大程度上依赖于人类的专业知识。这突显了对系统化的、基于知识的方法的需求。为了解决这一差距,我们提出了一个方法论框架,该框架将大型语言模型(LLM)Agent与数字孪生环境集成。LLM Agent持续解释系统状态并启动控制动作,包括对意外故障的响应,目标是使系统恢复正常运行。在这种情况下,数字孪生既充当特定于工厂的工程知识的结构化存储库,用于Agent提示,又充当用于系统验证和验证生成的纠正控制动作的仿真平台。使用流程工厂的混合模块进行的评估表明,所提出的框架不仅能够自主控制混合模块,而且能够生成有效的纠正措施,以缓解管道堵塞,只需几次重新提示。
🔬 方法详解
问题定义:流程工厂的故障处理高度依赖人工经验,缺乏系统化的知识方法。现有方法难以应对突发故障,需要人工干预,效率低下且容易出错。因此,需要一种能够自主诊断并处理故障的智能系统。
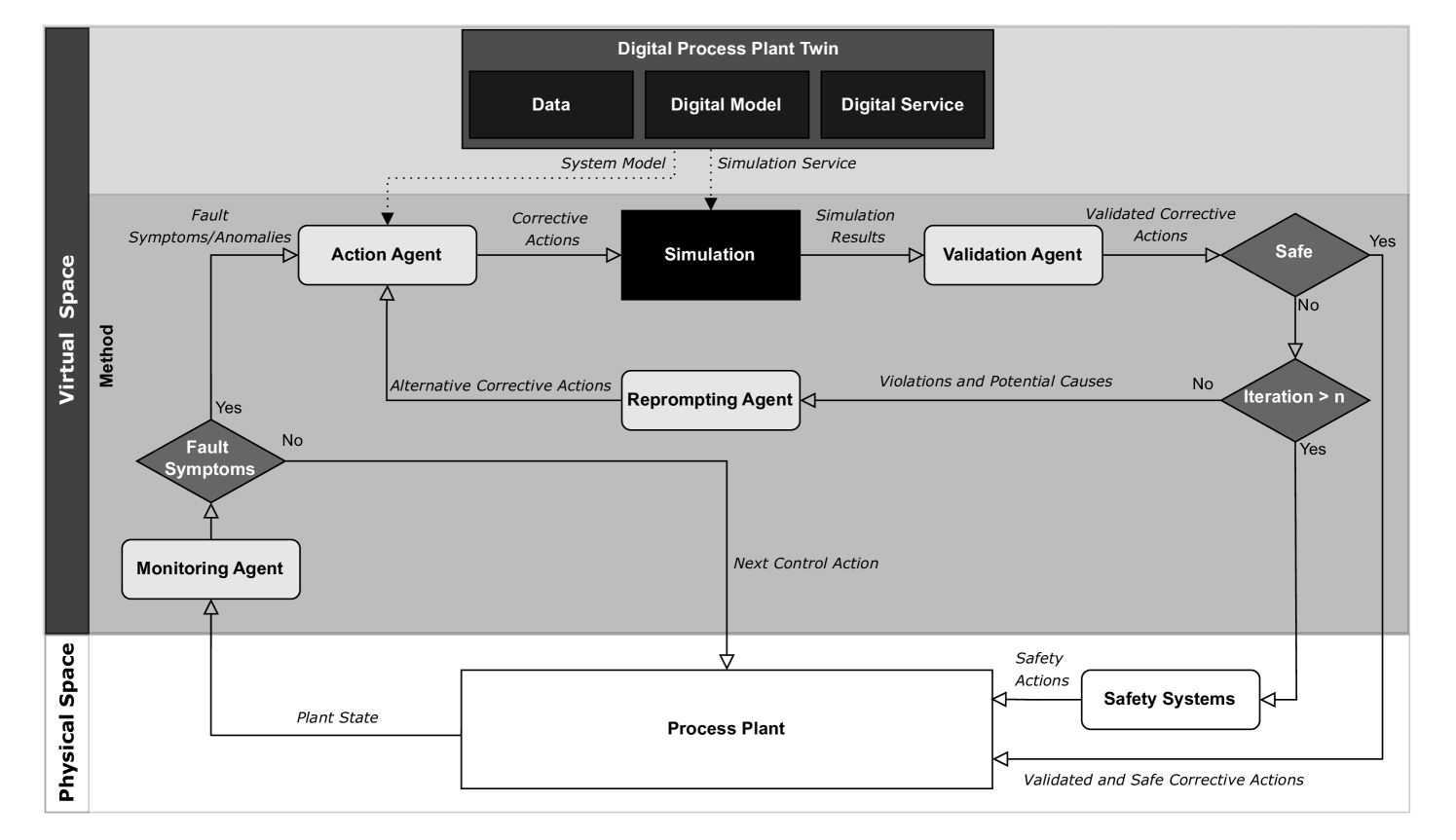
核心思路:利用大型语言模型(LLM)的推理能力和数字孪生的仿真能力,构建一个智能故障处理框架。LLM Agent负责理解系统状态、诊断故障并生成控制策略,数字孪生则作为知识库和仿真平台,用于验证控制策略的有效性。
技术框架:该框架包含LLM Agent和数字孪生两个主要模块。LLM Agent接收来自数字孪生的系统状态信息,利用预训练的知识和上下文信息进行推理,生成控制指令。数字孪生则模拟流程工厂的运行状态,为LLM Agent提供环境反馈,并验证控制指令的有效性。整个流程是一个闭环控制系统,LLM Agent根据数字孪生的反馈不断优化控制策略。
关键创新:该方法的核心创新在于将LLM Agent与数字孪生相结合,实现了流程工厂故障处理的自主化。LLM Agent的推理能力使得系统能够理解复杂的系统状态,并生成合理的控制策略。数字孪生的仿真能力则保证了控制策略的有效性和安全性。与传统的基于规则的故障处理方法相比,该方法具有更强的适应性和鲁棒性。
关键设计:LLM Agent使用预训练的语言模型,并通过特定于流程工厂的知识进行微调。数字孪生使用专业的仿真软件,能够精确模拟流程工厂的运行状态。控制指令的生成和执行需要考虑流程工厂的物理约束和安全要求。此外,需要设计合适的提示工程(prompt engineering)方法,引导LLM Agent生成有效的控制策略。
🖼️ 关键图片
📊 实验亮点
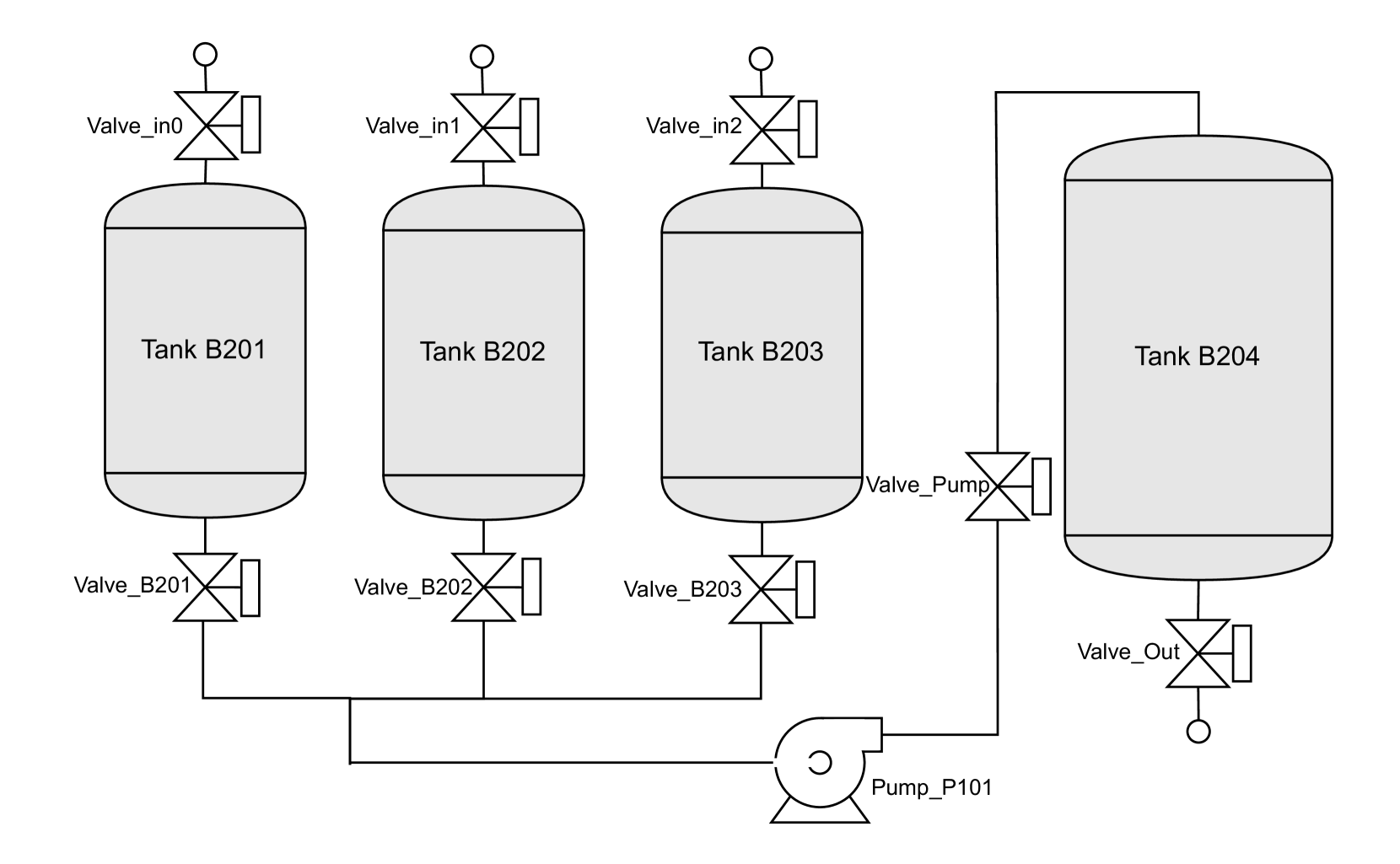
实验结果表明,该框架能够自主控制流程工厂的混合模块,并通过少量重新提示有效缓解管道堵塞问题。这表明该框架具有很强的适应性和鲁棒性,能够应对复杂的故障场景。具体的性能数据(例如,故障处理时间、成功率等)未在摘要中明确给出,属于未知信息。
🎯 应用场景
该研究成果可应用于各种流程工业,例如石油化工、制药、食品饮料等。通过部署该框架,可以显著提高流程工厂的自动化水平,降低人工干预的需求,提高生产效率和安全性。未来,该技术还可以扩展到其他领域,例如智能制造、智能交通等。
📄 摘要(原文)
Advances in Automation and Artificial Intelligence continue to enhance the autonomy of process plants in handling various operational scenarios. However, certain tasks, such as fault handling, remain challenging, as they rely heavily on human expertise. This highlights the need for systematic, knowledge-based methods. To address this gap, we propose a methodological framework that integrates Large Language Model (LLM) agents with a Digital Twin environment. The LLM agents continuously interpret system states and initiate control actions, including responses to unexpected faults, with the goal of returning the system to normal operation. In this context, the Digital Twin acts both as a structured repository of plant-specific engineering knowledge for agent prompting and as a simulation platform for the systematic validation and verification of the generated corrective control actions. The evaluation using a mixing module of a process plant demonstrates that the proposed framework is capable not only of autonomously controlling the mixing module, but also of generating effective corrective actions to mitigate a pipe clogging with only a few reprompts.