LLM-mediated Dynamic Plan Generation with a Multi-Agent Approach
作者: Reo Abe, Akifumi Ito, Kanata Takayasu, Satoshi Kurihara
分类: cs.AI, cs.RO
发布日期: 2025-04-02
💡 一句话要点
提出基于LLM的多智能体动态规划方法,提升机器人环境适应性
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 大型语言模型 动态规划 多智能体系统 机器人 环境适应性
📋 核心要点
- 现有规划方法在动态环境中的适应性不足,难以应对复杂多变的任务需求。
- 利用大型语言模型生成智能体网络,根据环境状态动态调整规划策略,提升适应性。
- 实验表明,该方法生成的网络具有更高的通用性和全面性,优于人工设计的网络。
📝 摘要(中文)
本文提出了一种利用大型语言模型(GPT-4o)自动生成适应动态环境网络的方法。该方法收集代表环境条件和目标的环境“状态”,并使用这些状态来生成智能体。这些智能体基于特定条件相互连接,形成兼具灵活性和通用性的网络。通过实验,将该方法自动生成的网络与手动构建的网络进行比较,验证了该方法生成网络的全面性和更高的通用性。这项研究标志着在开发适用于机器人、自动驾驶汽车、智能系统和其他复杂环境的多功能规划方法方面取得了重大进展。
🔬 方法详解
问题定义:现有机器人规划方法难以适应动态变化的环境,需要人工设计复杂的规则和策略,成本高且泛化能力差。论文旨在解决如何在动态环境中自动生成适应性强的规划网络的问题。
核心思路:利用大型语言模型(LLM)的强大生成能力和对环境的理解能力,将环境状态作为输入,自动生成具有特定功能的智能体,并通过条件连接这些智能体,形成一个动态规划网络。这种网络可以根据环境变化动态调整,从而提高适应性。
技术框架:该方法主要包含以下几个阶段:1. 环境状态收集:收集描述环境条件和目标的“状态”信息。2. 智能体生成:使用LLM(GPT-4o)根据环境状态生成具有特定功能的智能体。每个智能体代表一个特定的行动或决策。3. 智能体连接:基于特定条件将智能体相互连接,形成一个网络。连接条件定义了智能体之间的依赖关系和执行顺序。4. 动态规划:在生成的网络上执行动态规划,根据环境变化选择合适的智能体路径,从而实现适应性规划。
关键创新:该方法的核心创新在于利用LLM自动生成智能体网络,从而避免了人工设计的复杂性和局限性。通过将环境状态作为LLM的输入,可以生成与环境相关的智能体,并根据条件连接这些智能体,形成一个动态适应的网络。
关键设计:关键设计包括:1. 状态表示:如何有效地表示环境状态,以便LLM能够理解和利用。2. 智能体提示词设计:如何设计LLM的提示词,使其能够生成具有特定功能的智能体。3. 连接条件定义:如何定义智能体之间的连接条件,以确保网络的正确性和有效性。4. 网络规模控制:如何控制生成的智能体网络的规模,以避免计算复杂度过高。
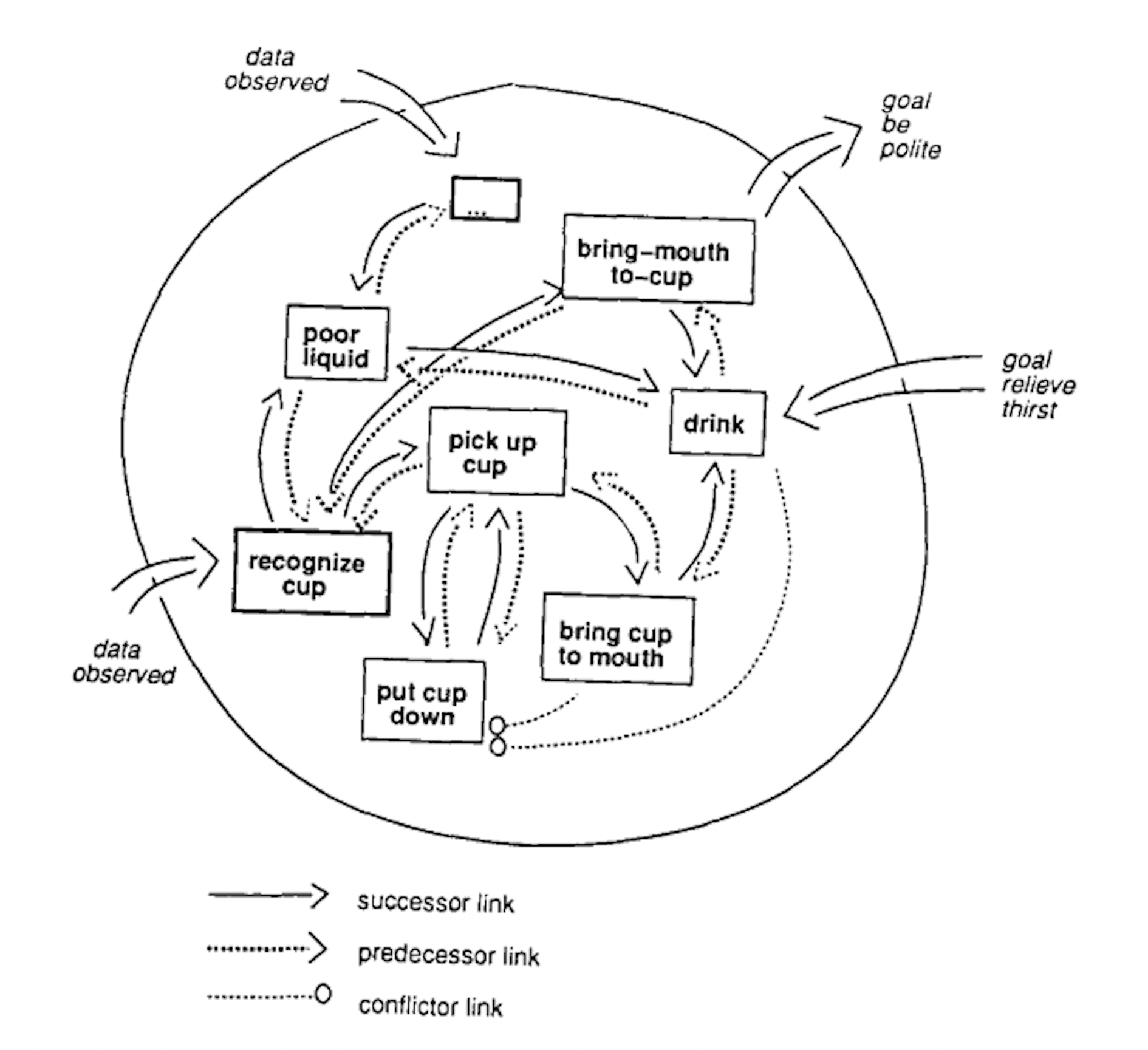
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法自动生成的智能体网络在通用性和全面性方面优于人工设计的网络。具体而言,自动生成的网络能够覆盖更广泛的环境状态,并能够更有效地应对动态变化。这表明该方法具有很强的潜力,可以用于开发更智能、更适应性的机器人和智能系统。
🎯 应用场景
该研究成果可应用于机器人、自动驾驶、智能家居等领域。在机器人领域,可以提升机器人在复杂环境中的自主导航和任务执行能力。在自动驾驶领域,可以提高车辆对交通状况的适应性和安全性。在智能家居领域,可以实现更智能、更个性化的服务。
📄 摘要(原文)
Planning methods with high adaptability to dynamic environments are crucial for the development of autonomous and versatile robots. We propose a method for leveraging a large language model (GPT-4o) to automatically generate networks capable of adapting to dynamic environments. The proposed method collects environmental "status," representing conditions and goals, and uses them to generate agents. These agents are interconnected on the basis of specific conditions, resulting in networks that combine flexibility and generality. We conducted evaluation experiments to compare the networks automatically generated with the proposed method with manually constructed ones, confirming the comprehensiveness of the proposed method's networks and their higher generality. This research marks a significant advancement toward the development of versatile planning methods applicable to robotics, autonomous vehicles, smart systems, and other complex environments.