Knowledge Graphs as World Models for Semantic Material-Aware Obstacle Handling in Autonomous Vehicles
作者: Ayush Bheemaiah, Seungyong Yang
分类: cs.AI
发布日期: 2025-03-27
💡 一句话要点
提出基于知识图谱的世界模型,提升自动驾驶车辆对语义材质的感知能力
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 自动驾驶 知识图谱 世界模型 语义理解 障碍物处理
📋 核心要点
- 自动驾驶车辆难以推断障碍物的材料属性,限制了其决策能力,尤其是在复杂交通场景中。
- 论文提出将传感器数据与知识图谱相结合,构建世界模型,使车辆能够理解障碍物的物理属性。
- 实验表明,该方法提高了车辆对障碍物的响应能力和变道成功率,验证了知识图谱在自动驾驶中的潜力。
📝 摘要(中文)
本研究旨在解决自动驾驶车辆(AVs)因无法推断障碍物的材料属性而导致的决策能力受限问题。论文提出将传感器系统(如相机、激光雷达和雷达)与基于知识图谱(KG)的世界模型相结合,以提高AVs对物理材料质量的理解。通过语义KG,AVs可以推断障碍物的延展性、密度和弹性等属性。在CARLA自动驾驶模拟器中的评估表明,基于KG的方法改善了障碍物处理,使AVs能够根据材料属性做出更好的决策,例如何时变道或紧急制动。实验结果表明,KG集成AV对障碍物的响应能力更强,紧急停车情况增加了13.3%,变道成功率提高了6.6%。该研究展示了基于KG的世界模型在具身智能系统中的潜力,并可扩展到机器人、医疗保健和环境模拟等领域。
🔬 方法详解
问题定义:自动驾驶车辆依赖传感器(如相机、激光雷达)检测障碍物,但传统方法难以理解障碍物的材料属性(如硬度、弹性),导致决策受限。例如,车辆无法区分交通锥(应绕行)和塑料袋(可碾压),从而影响行驶效率和安全性。现有方法的痛点在于缺乏对环境语义信息的有效利用。
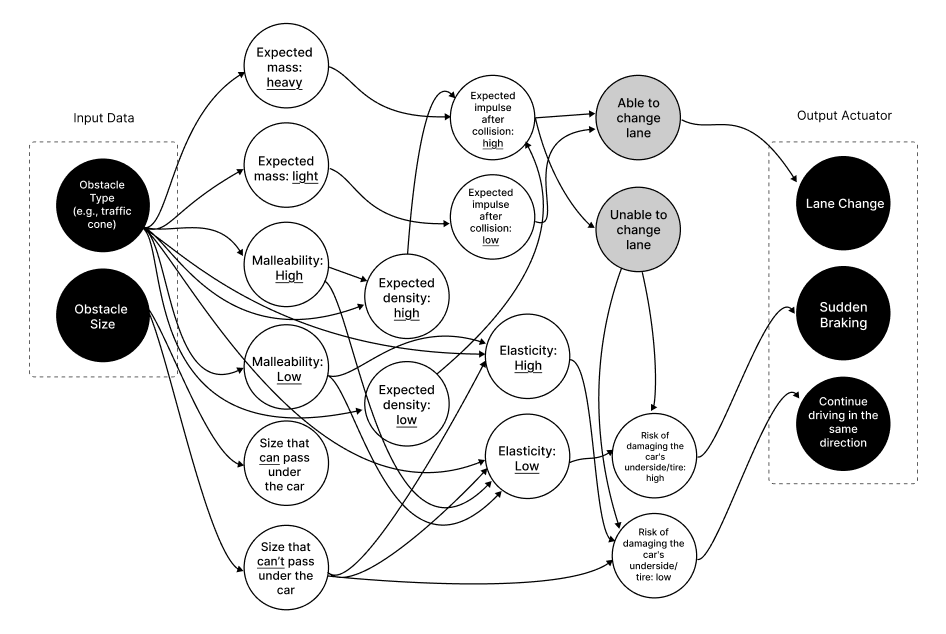
核心思路:论文的核心思路是构建一个基于知识图谱(KG)的世界模型,将障碍物的语义信息(包括材料属性)与传感器数据融合。通过KG,车辆可以推断障碍物的物理特性,从而做出更合理的驾驶决策。这种方法模拟了人类驾驶员根据经验判断物体属性的能力。
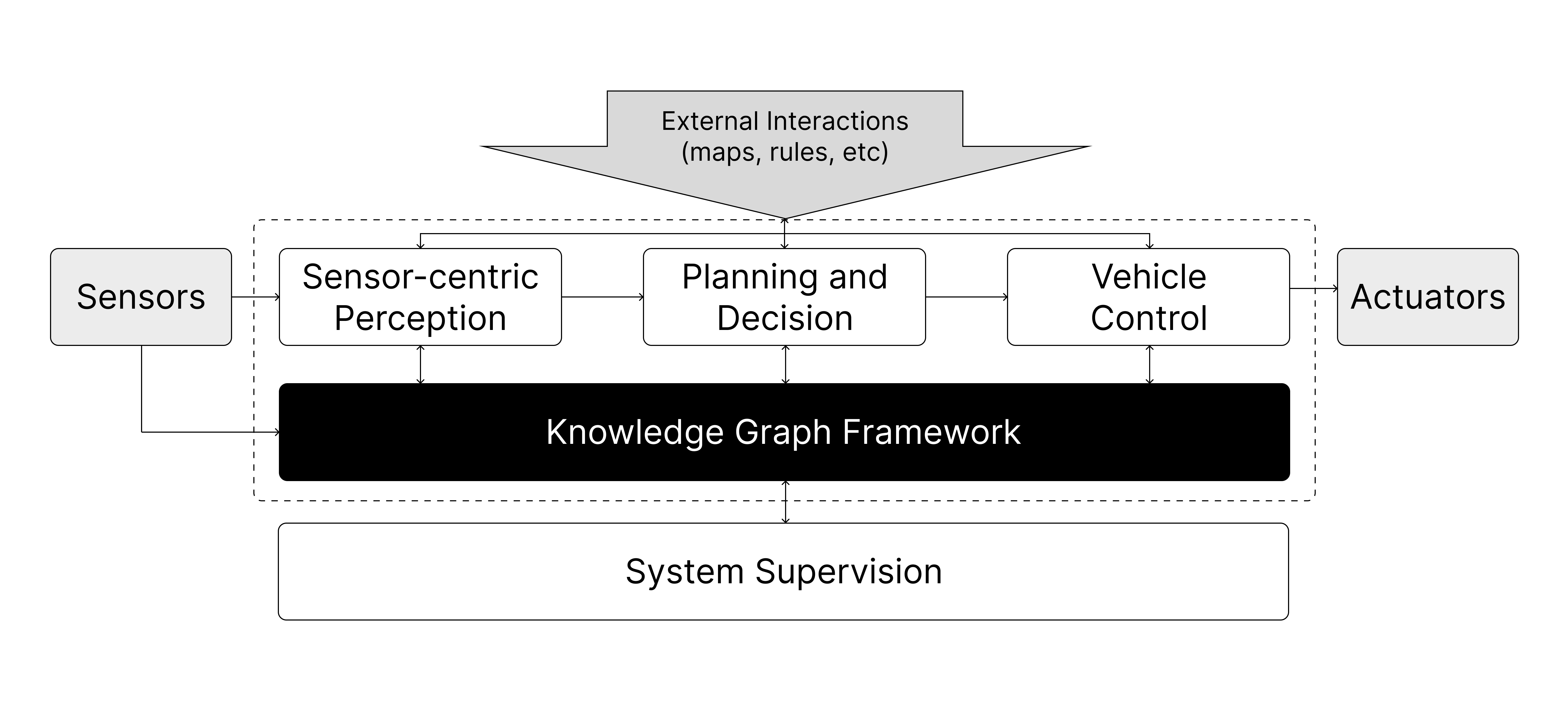
技术框架:该方法的技术框架主要包括以下几个模块:1) 传感器数据采集模块,负责获取车辆周围环境的视觉、激光雷达等数据;2) 知识图谱构建模块,构建包含障碍物及其材料属性的KG;3) 语义推理模块,利用KG推理障碍物的物理特性;4) 决策控制模块,根据推理结果控制车辆的行驶行为(如变道、制动)。整体流程是:传感器数据输入 -> KG查询与推理 -> 障碍物属性判断 -> 驾驶决策。
关键创新:该论文的关键创新在于将知识图谱引入自动驾驶领域,用于增强车辆对环境语义信息的理解。与传统方法相比,该方法能够利用KG中存储的知识,推断障碍物的材料属性,从而做出更智能的驾驶决策。这种方法弥补了传统传感器数据在语义理解方面的不足。
关键设计:论文中知识图谱的构建是关键设计之一。KG需要包含丰富的实体(如交通锥、塑料袋)和关系(如“交通锥是硬的”、“塑料袋是软的”)。KG的质量直接影响推理的准确性。此外,决策控制模块需要根据障碍物的属性设置不同的行为策略,例如,对于硬质障碍物,采取绕行策略;对于软质障碍物,采取碾压策略。具体的参数设置和损失函数等技术细节在论文中未详细说明,属于未知信息。
🖼️ 关键图片

📊 实验亮点
实验结果表明,基于知识图谱的方法显著提高了自动驾驶车辆的性能。与没有KG集成的控制系统相比,KG集成AV对障碍物的响应能力更强,紧急停车情况增加了13.3%。在变道场景中,KG集成AV的成功率提高了6.6%,尤其是在面对较大、高冲击障碍物时,提升更为明显。这些数据表明,KG能够有效提升车辆对环境的理解和决策能力。
🎯 应用场景
该研究成果可应用于自动驾驶车辆,提高其在复杂交通环境下的安全性和效率。此外,该方法还可扩展到其他具身智能系统,如机器人、医疗保健和环境模拟等领域。例如,在机器人领域,机器人可以利用KG理解物体的属性,从而更好地完成抓取、搬运等任务。在医疗保健领域,医生可以利用KG辅助诊断,了解疾病的关联关系。
📄 摘要(原文)
The inability of autonomous vehicles (AVs) to infer the material properties of obstacles limits their decision-making capacity. While AVs rely on sensor systems such as cameras, LiDAR, and radar to detect obstacles, this study suggests combining sensors with a knowledge graph (KG)-based world model to improve AVs' comprehension of physical material qualities. Beyond sensor data, AVs can infer qualities such as malleability, density, and elasticity using a semantic KG that depicts the relationships between obstacles and their attributes. Using the CARLA autonomous driving simulator, we evaluated AV performance with and without KG integration. The findings demonstrate that the KG-based method improves obstacle management, which allows AVs to use material qualities to make better decisions about when to change lanes or apply emergency braking. For example, the KG-integrated AV changed lanes for hard impediments like traffic cones and successfully avoided collisions with flexible items such as plastic bags by passing over them. Compared to the control system, the KG framework demonstrated improved responsiveness to obstacles by resolving conflicting sensor data, causing emergency stops for 13.3% more cases. In addition, our method exhibits a 6.6% higher success rate in lane-changing maneuvers in experimental scenarios, particularly for larger, high-impact obstacles. While we focus particularly on autonomous driving, our work demonstrates the potential of KG-based world models to improve decision-making in embodied AI systems and scale to other domains, including robotics, healthcare, and environmental simulation.