Automatic MILP Model Construction for Multi-Robot Task Allocation and Scheduling Based on Large Language Models
作者: Mingming Peng, Zhendong Chen, Jie Yang, Jin Huang, Zhengqi Shi, Qihao Liu, Xinyu Li, Liang Gao
分类: cs.AI, cs.RO
发布日期: 2025-03-18
💡 一句话要点
提出基于本地LLM的MILP自动建模框架,解决多机器人任务分配与调度问题
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多机器人系统 任务分配与调度 混合整数线性规划 大型语言模型 自动建模 知识增强 工业4.0
📋 核心要点
- 现有方法依赖领域专家知识,难以适应动态生产约束,且企业对生产调度数据有较高隐私要求。
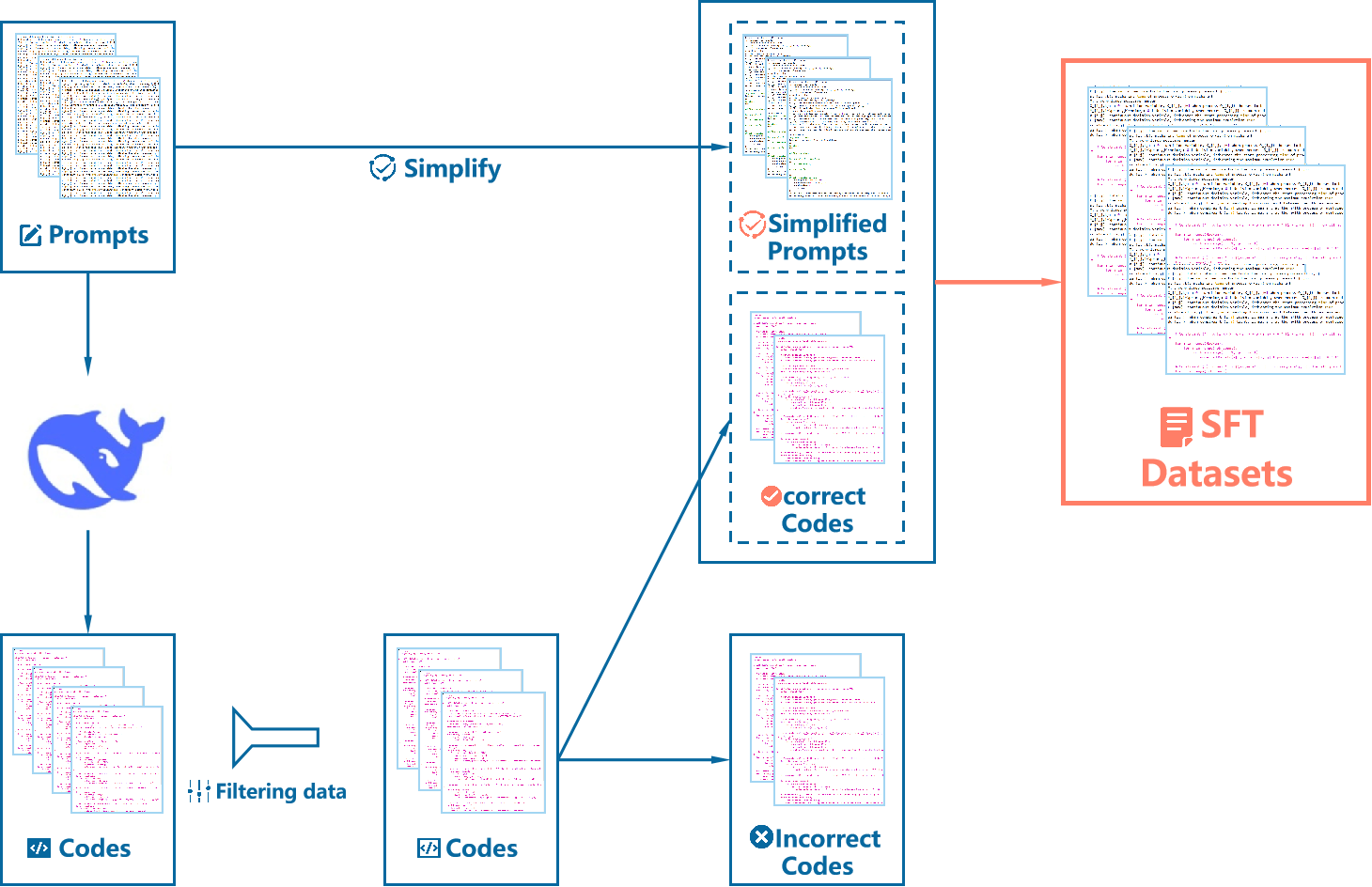
- 提出一种知识增强的MILP自动建模框架,结合本地LLM与领域知识库,从自然语言描述自动生成代码。
- 实验表明,该框架在飞机蒙皮制造案例中成功实现自动建模,保证数据隐私和计算效率。
📝 摘要(中文)
本文提出了一种知识增强的混合整数线性规划(MILP)自动建模框架,旨在解决工业4.0背景下多机器人系统任务分配与调度问题。该框架集成了本地大型语言模型(LLMs)与领域知识库,能够从自然语言描述中自动生成可执行代码。具体而言,利用知识引导的DeepSeek-R1-Distill-Qwen-32B模型提取复杂的时空约束(平均准确率82%),并采用监督微调的Qwen2.5-Coder-7B-Instruct模型高效生成MILP代码(平均准确率90%)。实验结果表明,该框架成功实现了飞机蒙皮制造案例中的自动建模,同时保证了数据隐私和计算效率。这项研究为复杂工业场景中的建模提供了一条低门槛且高度可靠的技术路径。
🔬 方法详解
问题定义:论文旨在解决多机器人系统中任务分配和调度问题,特别是在工业4.0背景下,现有方法依赖于领域专家知识,难以适应动态变化的生产约束。此外,企业对生产调度数据有严格的隐私要求,无法直接使用云端LLM进行方案开发。因此,需要一种自动化的建模方案,既能适应复杂场景,又能满足数据隐私需求。
核心思路:论文的核心思路是利用本地部署的LLM,结合领域知识库,将自然语言描述的任务需求自动转化为可执行的MILP代码。通过这种方式,降低了建模门槛,减少了对领域专家的依赖,同时保证了数据隐私。
技术框架:该框架主要包含两个阶段:一是约束提取阶段,利用知识引导的DeepSeek-R1-Distill-Qwen-32B模型从自然语言描述中提取复杂的时空约束;二是代码生成阶段,采用监督微调的Qwen2.5-Coder-7B-Instruct模型,将提取的约束转化为MILP代码。整个流程实现了从自然语言到可执行代码的自动转换。
关键创新:该方法最重要的创新在于将LLM应用于MILP模型的自动构建,并强调了本地部署和知识增强。与传统方法相比,无需人工编写MILP模型,大大降低了建模难度和时间成本。同时,本地部署保证了数据隐私,知识增强提高了LLM在特定领域的性能。
关键设计:在约束提取阶段,使用了知识引导的方法,具体细节未知。在代码生成阶段,对Qwen2.5-Coder-7B-Instruct模型进行了监督微调,使用了特定的训练数据集,具体损失函数和网络结构细节未知。DeepSeek-R1-Distill-Qwen-32B和Qwen2.5-Coder-7B-Instruct模型的选择是基于其在代码生成和自然语言理解方面的能力。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该框架在飞机蒙皮制造案例中成功实现了自动建模,约束提取的平均准确率达到82%,MILP代码生成的平均准确率达到90%。这些数据表明,该框架在保证数据隐私和计算效率的同时,能够有效地解决实际工业问题。
🎯 应用场景
该研究成果可广泛应用于智能制造领域,例如自动化生产线调度、物流仓储管理、以及其他需要优化资源分配的场景。通过降低建模门槛和提高建模效率,可以帮助企业快速部署和优化多机器人系统,提升生产效率和降低成本。未来,该技术有望扩展到更复杂的工业场景,并与其他AI技术相结合,实现更智能化的生产管理。
📄 摘要(原文)
With the accelerated development of Industry 4.0, intelligent manufacturing systems increasingly require efficient task allocation and scheduling in multi-robot systems. However, existing methods rely on domain expertise and face challenges in adapting to dynamic production constraints. Additionally, enterprises have high privacy requirements for production scheduling data, which prevents the use of cloud-based large language models (LLMs) for solution development. To address these challenges, there is an urgent need for an automated modeling solution that meets data privacy requirements. This study proposes a knowledge-augmented mixed integer linear programming (MILP) automated formulation framework, integrating local LLMs with domain-specific knowledge bases to generate executable code from natural language descriptions automatically. The framework employs a knowledge-guided DeepSeek-R1-Distill-Qwen-32B model to extract complex spatiotemporal constraints (82% average accuracy) and leverages a supervised fine-tuned Qwen2.5-Coder-7B-Instruct model for efficient MILP code generation (90% average accuracy). Experimental results demonstrate that the framework successfully achieves automatic modeling in the aircraft skin manufacturing case while ensuring data privacy and computational efficiency. This research provides a low-barrier and highly reliable technical path for modeling in complex industrial scenarios.