Parallelized Planning-Acting for Efficient LLM-based Multi-Agent Systems
作者: Yaoru Li, Shunyu Liu, Tongya Zheng, Mingli Song
分类: cs.AI
发布日期: 2025-03-05
💡 一句话要点
提出并行化规划-行动框架,提升LLM多智能体系统在动态环境中的效率
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多智能体系统 大型语言模型 并行计算 规划与行动 动态环境
📋 核心要点
- 现有基于LLM的多智能体系统采用串行执行,智能体需完成规划后才能行动,限制了在动态环境中的实时响应。
- 论文提出并行化规划-行动框架,通过双线程架构实现规划与行动的并发执行,提高系统效率。
- 在Minecraft游戏中进行的大量实验表明,该框架能够有效提升多智能体系统的性能。
📝 摘要(中文)
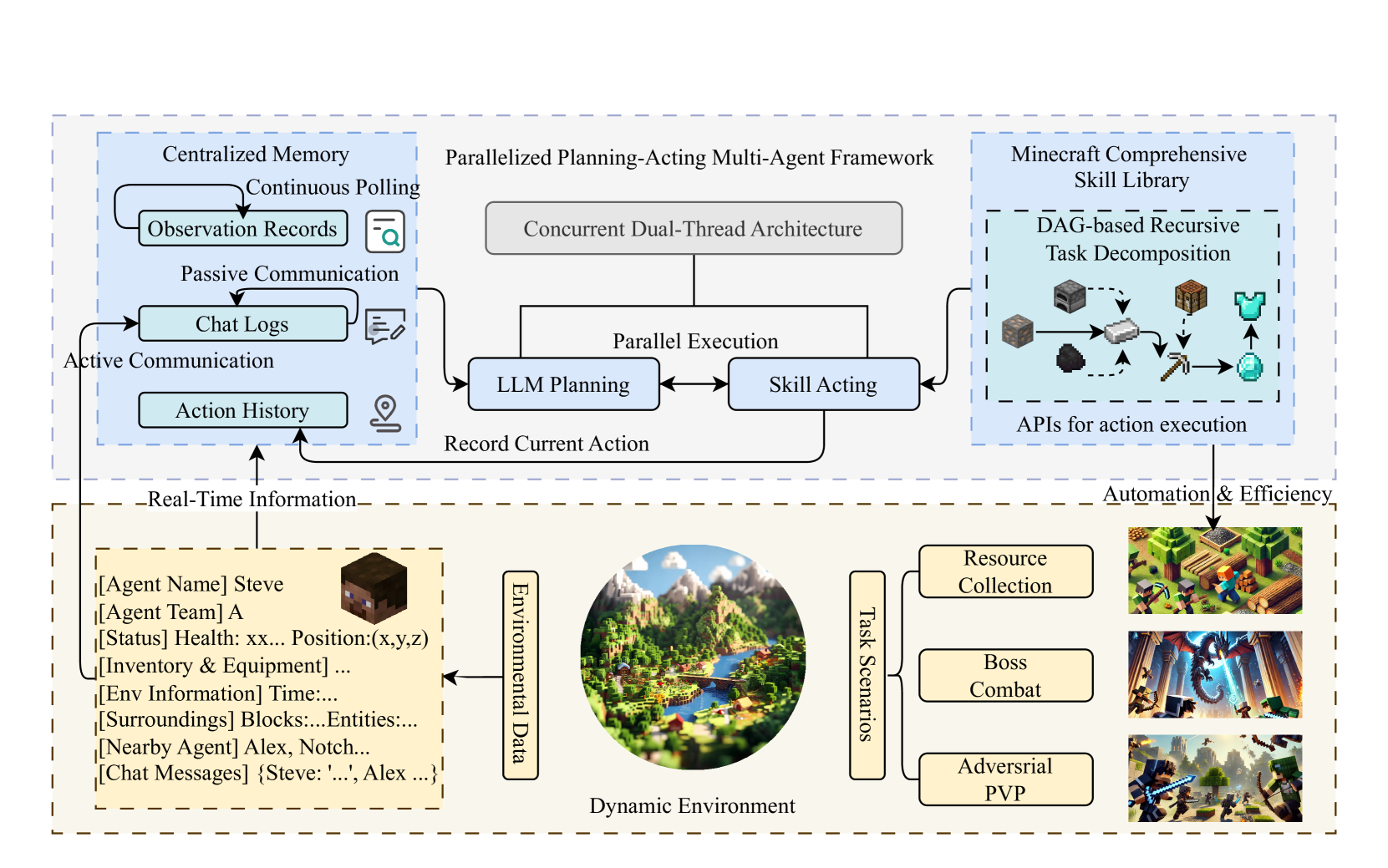
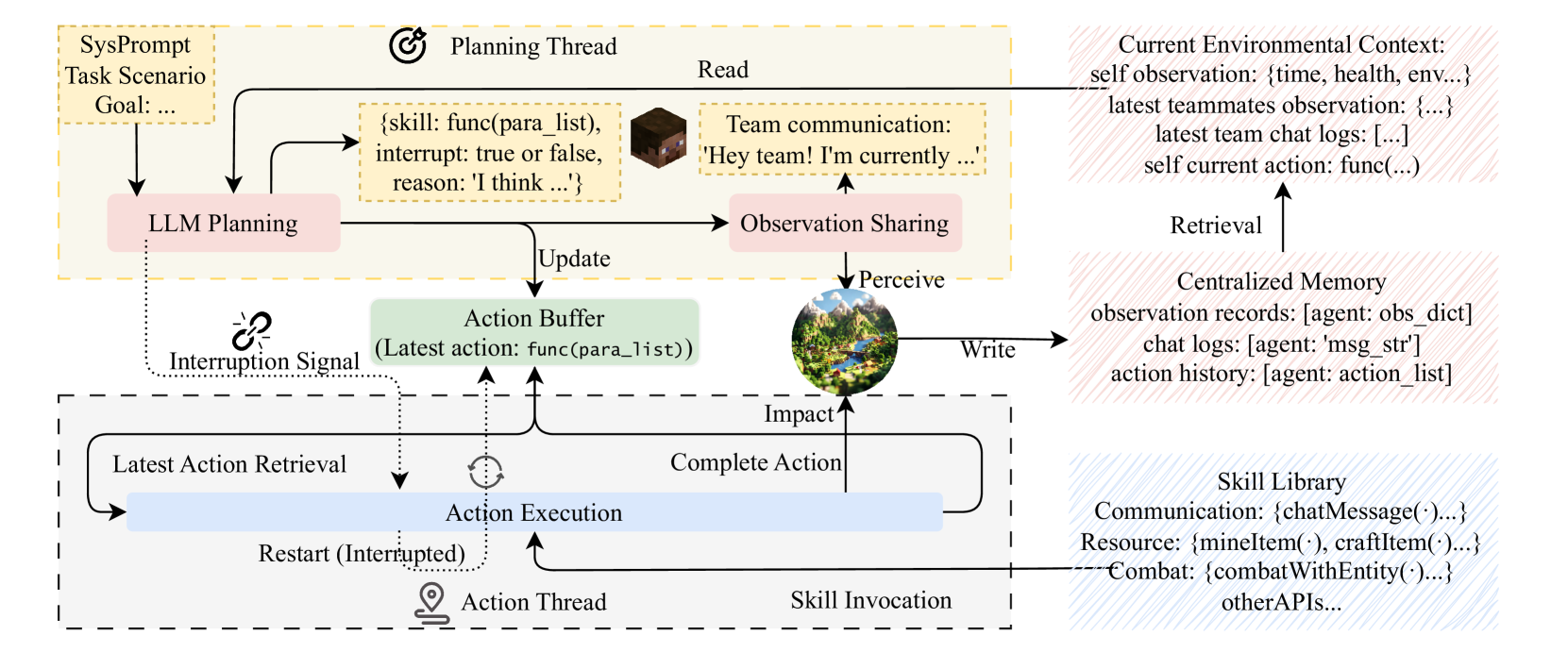
本文提出了一种基于大型语言模型(LLM)的多智能体系统(MAS)的并行化规划-行动框架,旨在解决现有框架中串行执行范式导致的实时响应和适应性不足的问题。该框架采用双线程架构,通过可中断执行实现并发规划和行动。具体而言,框架包含两个核心线程:一个由集中式记忆系统驱动的规划线程,维护环境状态和智能体通信的同步,以支持动态决策;另一个是配备了综合技能库的行动线程,通过递归分解实现自动化任务执行。在Minecraft上的大量实验验证了该框架的有效性。
🔬 方法详解
问题定义:现有基于LLM的多智能体系统通常采用串行的规划-行动模式。这意味着每个智能体必须先完成对下一步行动的详细规划,然后才能执行该行动。这种模式在静态环境中尚可接受,但在动态、实时变化的环境中,会显著降低系统的响应速度和适应能力。智能体无法及时根据环境变化调整策略,导致效率低下甚至任务失败。
核心思路:论文的核心思路是将规划和行动两个过程并行化。通过让智能体在执行当前行动的同时,并行地进行下一步行动的规划,从而减少等待时间,提高系统的整体效率。这种并行化不仅提高了响应速度,也使得智能体能够更快地适应环境变化。
技术框架:该框架采用双线程架构,包含规划线程和行动线程。规划线程负责根据环境状态和智能体之间的通信信息,利用LLM进行决策规划,并维护一个集中式的记忆系统,用于同步环境状态。行动线程则负责执行规划线程生成的行动指令,通过一个综合技能库,将复杂任务递归分解为可执行的子任务。两个线程并行运行,并通过可中断执行机制进行协调,确保系统能够及时响应环境变化。
关键创新:该论文最关键的创新在于提出了并行化的规划-行动框架。与传统的串行执行模式相比,该框架能够显著提高多智能体系统的效率和响应速度。此外,可中断执行机制也保证了系统在动态环境中的适应性。
关键设计:集中式记忆系统用于维护环境状态和智能体通信的同步,确保规划线程能够获取最新的信息。技能库的设计允许行动线程将复杂任务分解为一系列简单的、可执行的动作。可中断执行机制允许行动线程在必要时中断当前行动,以便执行更紧急的任务。具体的参数设置和网络结构等技术细节在论文中未详细描述,属于未知信息。
🖼️ 关键图片

📊 实验亮点
论文在Minecraft游戏中进行了实验,验证了所提出的并行化规划-行动框架的有效性。具体的性能数据和对比基线在摘要中未提及,属于未知信息。但实验结果表明,该框架能够显著提高多智能体系统的效率,使其能够更好地适应动态环境。
🎯 应用场景
该研究成果可应用于各种需要多智能体协作的动态环境中,例如:自动驾驶、机器人协同作业、智能交通管理、以及资源调度等领域。通过提高多智能体系统的效率和响应速度,可以显著提升这些应用的性能和用户体验,并为未来的智能系统发展奠定基础。
📄 摘要(原文)
Recent advancements in Large Language Model(LLM)-based Multi-Agent Systems(MAS) have demonstrated remarkable potential for tackling complex decision-making tasks. However, existing frameworks inevitably rely on serialized execution paradigms, where agents must complete sequential LLM planning before taking action. This fundamental constraint severely limits real-time responsiveness and adaptation, which is crucial in dynamic environments with ever-changing scenarios. In this paper, we propose a novel parallelized planning-acting framework for LLM-based MAS, featuring a dual-thread architecture with interruptible execution to enable concurrent planning and acting. Specifically, our framework comprises two core threads:(1) a planning thread driven by a centralized memory system, maintaining synchronization of environmental states and agent communication to support dynamic decision-making; and (2) an acting thread equipped with a comprehensive skill library, enabling automated task execution through recursive decomposition. Extensive experiments on challenging Minecraft demonstrate the effectiveness of the proposed framework.