Exploring Causality for HRI: A Case Study on Robotic Mental Well-being Coaching
作者: Micol Spitale, Srikar Babu, Serhan Cakmak, Jiaee Cheong, Hatice Gunes
分类: cs.AI, cs.CY, cs.HC, cs.LG, cs.RO
发布日期: 2025-03-04
💡 一句话要点
探索因果关系在人机交互中的应用:以机器人心理健康辅导为例
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 人机交互 因果关系 自适应学习 机器人教练 心理健康
📋 核心要点
- 现有自适应学习模型在人机交互中面临数据稀缺的挑战,尤其是在医疗健康等敏感领域,限制了机器人的适应能力。
- 该研究探索了基于因果关系的分析方法,旨在超越模式识别,使机器人能够做出更具解释性和通用性的决策。
- 通过机器人心理健康辅导的案例研究,分析了适应性如何增强互动期间的幸福感,并为实际应用提供参考。
📝 摘要(中文)
人机交互研究的主要目标之一是开发能够理解人类行为并相应调整其反应的机器人。自适应学习模型,如持续学习和强化学习,在提高机器人在现实环境中有效交互的能力方面发挥着关键作用。然而,由于现实世界数据的有限性,尤其是在医疗保健和福祉等敏感领域,这些模型面临着重大挑战。这种数据稀缺会阻碍机器人适应新情况的能力。为了应对这些挑战,因果关系提供了一个结构化的框架,用于理解和建模动作、事件和结果之间的潜在关系。通过超越单纯的模式识别,因果关系使机器人能够做出更具解释性和通用性的决策。本文通过一个案例研究,对基于因果关系的探索性分析进行了展示,该案例研究涉及一个自适应机器人教练在工作场所环境中进行为期四周的积极心理学练习。机器人教练自主适应多模态人类行为,如面部表情效价和语音持续时间。通过进行宏观和微观层面的因果分析,本研究旨在更深入地了解适应性如何增强互动期间的幸福感。最终,这项研究旨在增进我们对因果关系如何帮助克服人机交互中的挑战的理解,尤其是在实际应用中。
🔬 方法详解
问题定义:论文旨在解决人机交互中,由于真实世界数据匮乏,导致机器人难以适应新环境,从而影响交互效果的问题。现有方法主要依赖模式识别,缺乏对行为之间因果关系的理解,导致决策缺乏解释性和泛化能力。
核心思路:论文的核心思路是引入因果关系建模,将人类行为、机器人动作和交互结果之间的关系用因果图表示,从而使机器人能够理解行为背后的因果机制,做出更合理、可解释的决策。通过理解因果关系,机器人可以更好地适应新的交互场景,提高交互效果。
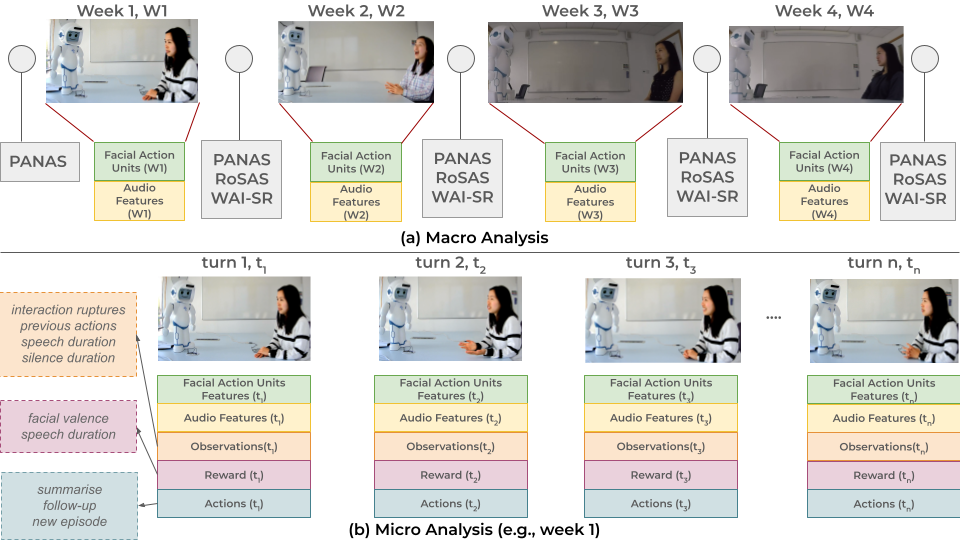
技术框架:该研究采用了一个自适应机器人教练,在工作场所环境中进行为期四周的积极心理学练习。机器人教练通过摄像头和麦克风获取人类的面部表情和语音信息,并根据这些信息调整其行为。研究人员使用因果推断方法,分析了机器人行为、人类行为和幸福感之间的因果关系。具体包括宏观层面的整体因果关系分析和微观层面的细粒度因果关系分析。
关键创新:该研究的关键创新在于将因果关系建模引入到人机交互领域,并将其应用于自适应机器人教练的案例研究中。通过因果分析,研究人员能够更深入地理解机器人行为对人类幸福感的影响,并为机器人设计提供指导。与传统的模式识别方法相比,基于因果关系的方法能够提供更强的解释性和泛化能力。
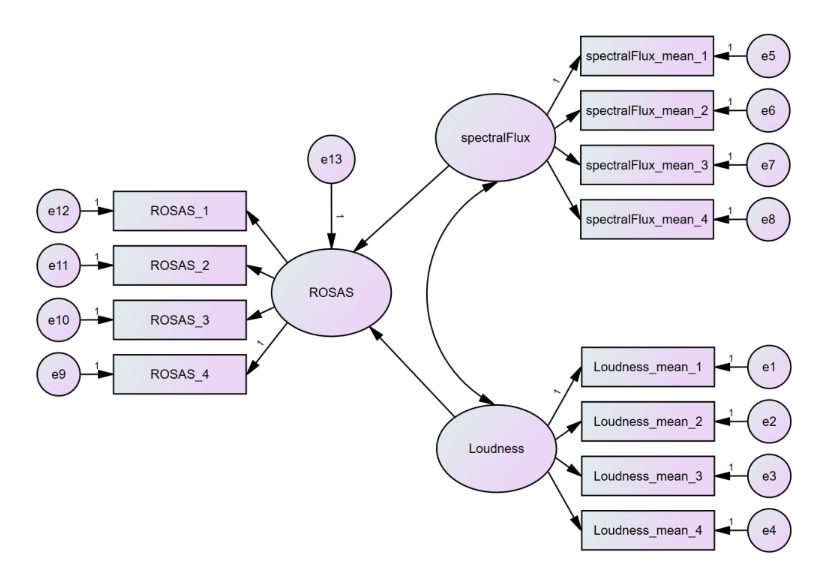
关键设计:研究中使用了多模态数据融合,将面部表情和语音信息结合起来,以更全面地理解人类的情感状态。同时,研究人员设计了自适应算法,使机器人能够根据人类的行为调整其行为。在因果分析方面,研究人员采用了多种因果推断方法,包括干预分析和反事实推理,以更准确地估计因果效应。具体的参数设置和网络结构等技术细节在论文中未详细描述,属于未知。
🖼️ 关键图片

📊 实验亮点
该研究通过实际案例验证了因果关系建模在人机交互中的有效性。通过宏观和微观层面的因果分析,揭示了机器人行为与人类幸福感之间的复杂关系。虽然论文中没有提供具体的性能数据和对比基线,但其探索性的研究方法为未来人机交互研究提供了新的思路。
🎯 应用场景
该研究成果可应用于各种人机交互场景,例如:智能家居、教育机器人、医疗辅助机器人等。通过理解人类行为背后的因果关系,机器人可以更好地适应人类的需求,提供更个性化、更有效的服务。该研究为开发更智能、更人性化的机器人系统奠定了基础,具有广阔的应用前景。
📄 摘要(原文)
One of the primary goals of Human-Robot Interaction (HRI) research is to develop robots that can interpret human behavior and adapt their responses accordingly. Adaptive learning models, such as continual and reinforcement learning, play a crucial role in improving robots' ability to interact effectively in real-world settings. However, these models face significant challenges due to the limited availability of real-world data, particularly in sensitive domains like healthcare and well-being. This data scarcity can hinder a robot's ability to adapt to new situations. To address these challenges, causality provides a structured framework for understanding and modeling the underlying relationships between actions, events, and outcomes. By moving beyond mere pattern recognition, causality enables robots to make more explainable and generalizable decisions. This paper presents an exploratory causality-based analysis through a case study of an adaptive robotic coach delivering positive psychology exercises over four weeks in a workplace setting. The robotic coach autonomously adapts to multimodal human behaviors, such as facial valence and speech duration. By conducting both macro- and micro-level causal analyses, this study aims to gain deeper insights into how adaptability can enhance well-being during interactions. Ultimately, this research seeks to advance our understanding of how causality can help overcome challenges in HRI, particularly in real-world applications.