Pretrained Embeddings as a Behavior Specification Mechanism
作者: Parv Kapoor, Abigail Hammer, Ashish Kapoor, Karen Leung, Eunsuk Kang
分类: cs.AI, cs.RO, cs.SE
发布日期: 2025-03-03 (更新: 2025-03-06)
备注: 18 pages, 6 figures
💡 一句话要点
提出Embedding时序逻辑(ETL),用于形式化描述AI系统行为属性
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 嵌入时序逻辑 形式化验证 机器人规划 行为规范 人工智能系统
📋 核心要点
- 现有方法难以形式化描述依赖感知模型的AI系统行为属性,尤其是在机器人等物理交互场景。
- 论文提出Embedding时序逻辑(ETL),将嵌入作为规范语言的基本元素,通过嵌入距离定义系统行为属性。
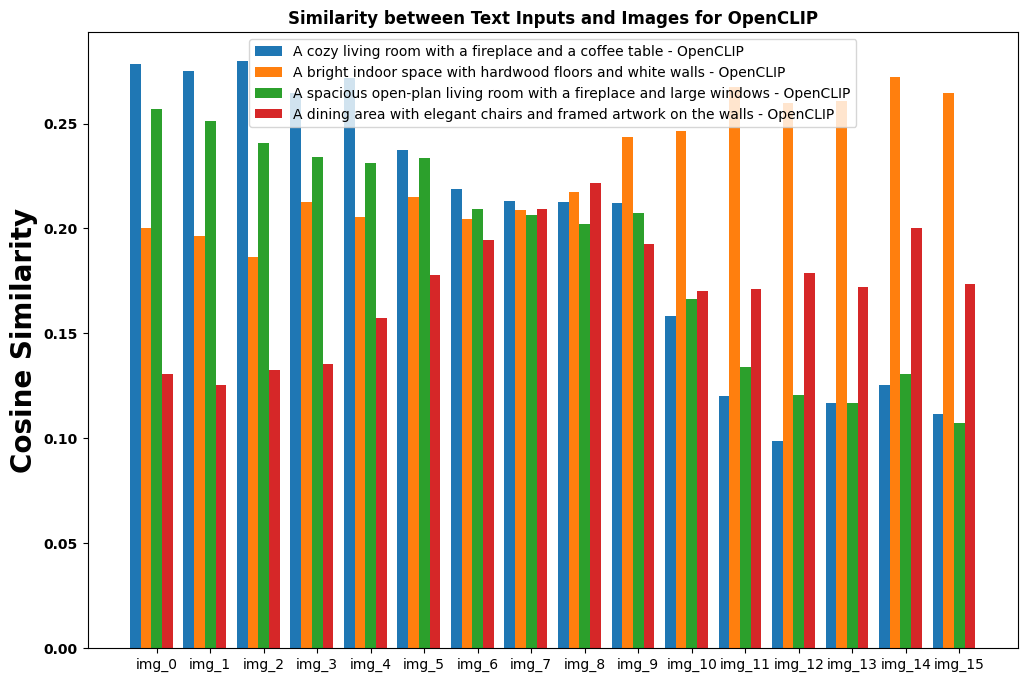
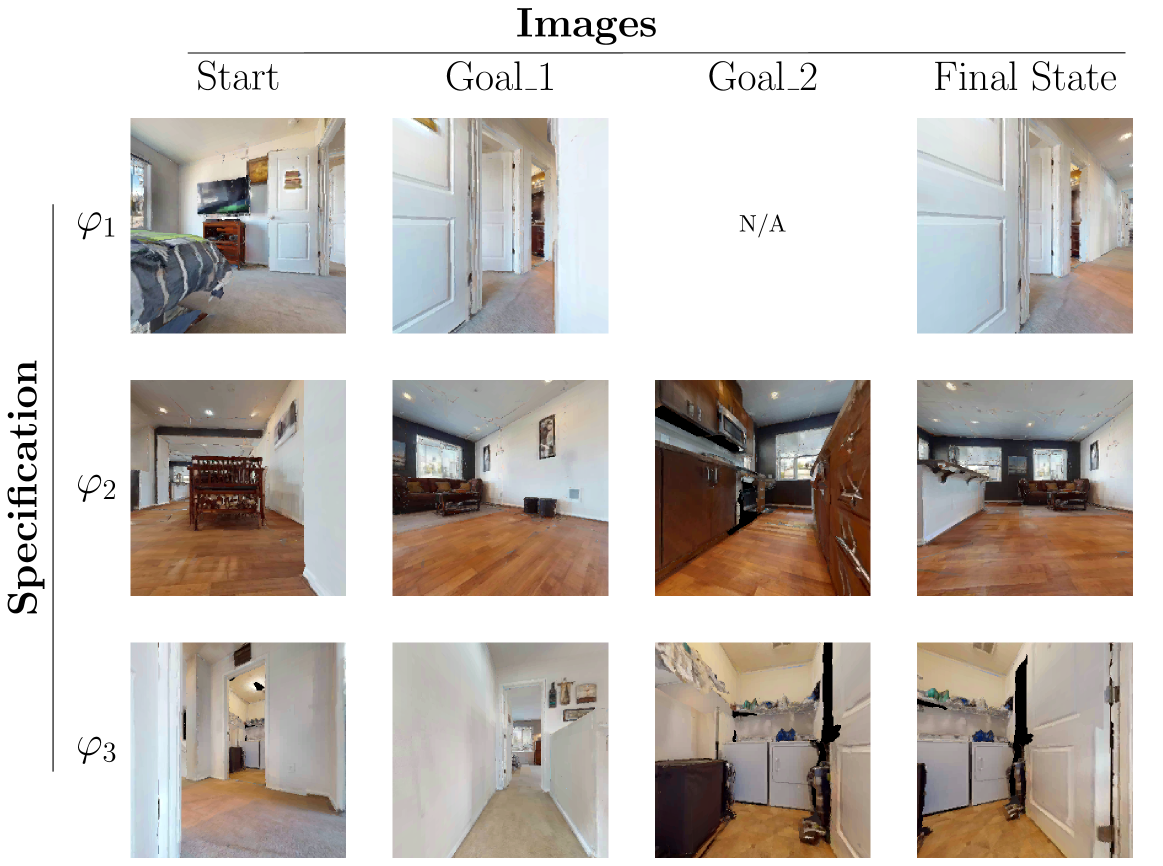
- 初步实验表明,ETL能有效引导机器人系统产生期望行为,验证了基于嵌入规范的有效性。
📝 摘要(中文)
本文提出了一种形式化描述系统行为属性的方法,该系统依赖于感知模型与物理世界交互。核心思想是将嵌入(现实世界概念的数学表示)引入到规范语言中,作为一等公民。属性用理想嵌入和观察到的嵌入之间的距离来表示。为了实现这一方法,我们提出了一种新的时序逻辑,称为嵌入时序逻辑(ETL),并描述了它如何用于表达比以前可能表达的更广泛的关于人工智能系统的属性。我们通过在由基础模型驱动的机器人的规划任务中进行的初步评估,证明了ETL的适用性;结果是有希望的,表明基于嵌入的规范可以用于引导系统朝着期望的行为发展。
🔬 方法详解
问题定义:现有方法在形式化描述依赖感知模型的AI系统行为属性方面存在困难。特别是在机器人等与物理世界交互的系统中,感知模型的不确定性使得精确的行为规范变得复杂。传统的时序逻辑难以有效地处理这种不确定性,并且难以直接表达基于感知信息的行为属性。
核心思路:论文的核心思路是将现实世界概念的嵌入表示引入到形式化规范语言中。通过将嵌入作为一等公民,可以将行为属性定义为理想嵌入和实际观察到的嵌入之间的距离。这种方法允许更灵活和直观地表达基于感知信息的行为规范。
技术框架:论文提出了Embedding时序逻辑(ETL),这是一种新的时序逻辑,它扩展了传统时序逻辑以支持嵌入。ETL包含以下主要组件:1) 嵌入函数,用于将现实世界状态映射到嵌入空间;2) 时序运算符,用于表达时间上的约束;3) 距离度量,用于衡量理想嵌入和观察到的嵌入之间的差异。整个流程包括:首先,定义期望行为的理想嵌入;然后,使用ETL公式描述系统在不同时间步的嵌入应该满足的约束;最后,使用规划器或控制器来引导系统行为,使其满足ETL规范。
关键创新:论文的关键创新在于将嵌入作为形式化规范语言的基本元素。与传统的基于符号或状态的规范相比,基于嵌入的规范更具表达力,并且能够更好地处理感知模型的不确定性。ETL允许直接表达基于感知信息的行为属性,例如“机器人应该朝着目标方向移动”或“机器人应该避开障碍物”。
关键设计:ETL的关键设计包括:1) 嵌入函数的选择,这取决于具体的应用场景和感知模型;2) 距离度量的选择,这决定了如何衡量理想嵌入和观察到的嵌入之间的差异;3) 时序运算符的选择,这决定了可以表达的时间约束的类型。论文没有提供具体的参数设置或网络结构,因为这些细节取决于具体的应用场景和感知模型。但是,论文强调了选择合适的嵌入函数和距离度量的重要性,以确保ETL规范能够有效地表达期望的行为属性。
🖼️ 关键图片

📊 实验亮点
论文通过在机器人规划任务中的初步评估,验证了ETL的有效性。实验结果表明,基于嵌入的规范可以有效地引导机器人系统朝着期望的行为发展。虽然论文没有提供具体的性能数据或对比基线,但实验结果表明ETL具有很大的潜力,可以用于形式化描述和验证AI系统的行为。
🎯 应用场景
该研究成果可应用于机器人、自动驾驶、智能制造等领域。通过ETL,可以更精确地描述和验证AI系统的行为,提高系统的安全性和可靠性。例如,在自动驾驶中,可以使用ETL来规范车辆的行驶轨迹和避障行为;在智能制造中,可以使用ETL来规范机器人的操作流程和质量控制。
📄 摘要(原文)
We propose an approach to formally specifying the behavioral properties of systems that rely on a perception model for interactions with the physical world. The key idea is to introduce embeddings -- mathematical representations of a real-world concept -- as a first-class construct in a specification language, where properties are expressed in terms of distances between a pair of ideal and observed embeddings. To realize this approach, we propose a new type of temporal logic called Embedding Temporal Logic (ETL), and describe how it can be used to express a wider range of properties about AI-enabled systems than previously possible. We demonstrate the applicability of ETL through a preliminary evaluation involving planning tasks in robots that are driven by foundation models; the results are promising, showing that embedding-based specifications can be used to steer a system towards desirable behaviors.