Mitigating the Uncanny Valley Effect in Hyper-Realistic Robots: A Student-Centered Study on LLM-Driven Conversations
作者: Hangyeol Kang, Thiago Freitas dos Santos, Maher Ben Moussa, Nadia Magnenat-Thalmann
分类: cs.HC, cs.AI, cs.RO
发布日期: 2025-02-18
💡 一句话要点
利用LLM驱动对话缓解超现实机器人中的不适感
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 不适感效应 大型语言模型 人机交互 超现实机器人 用户体验 对话系统 社交机器人
📋 核心要点
- 不适感效应是超现实社交机器人开发中的主要挑战,影响用户的接受度和互动体验。
- 本研究提出通过大型语言模型驱动的对话能力来改善用户与超现实机器人的互动质量。
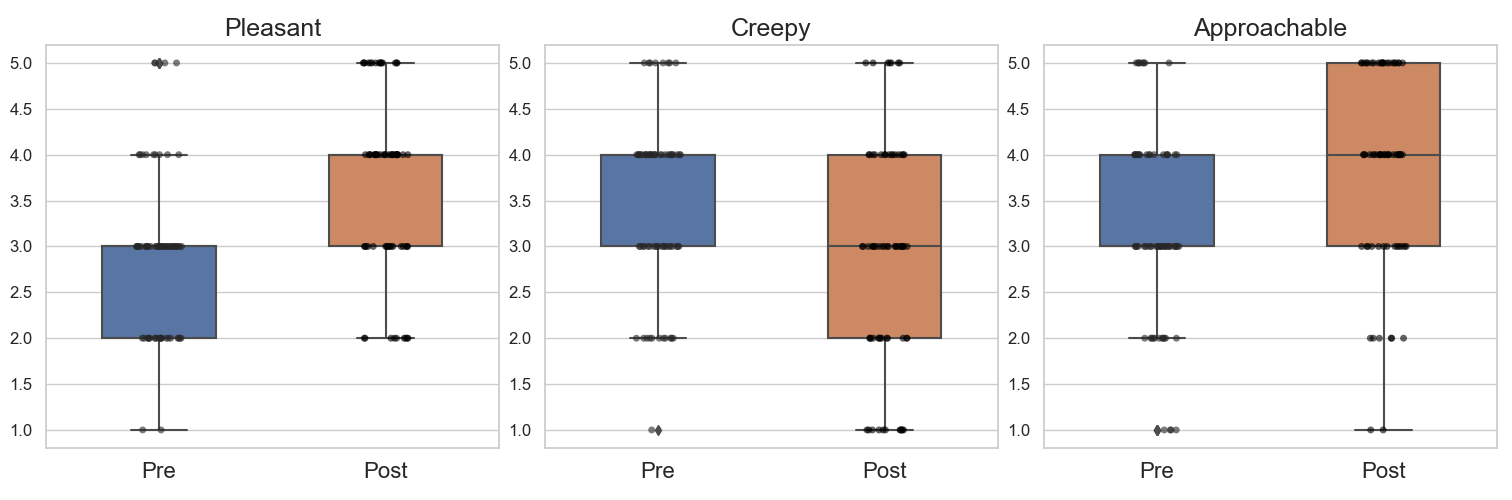
- 实验结果显示,LLM增强的对话显著降低了用户的不适感,提高了对话的自然性和趣味性。
📝 摘要(中文)
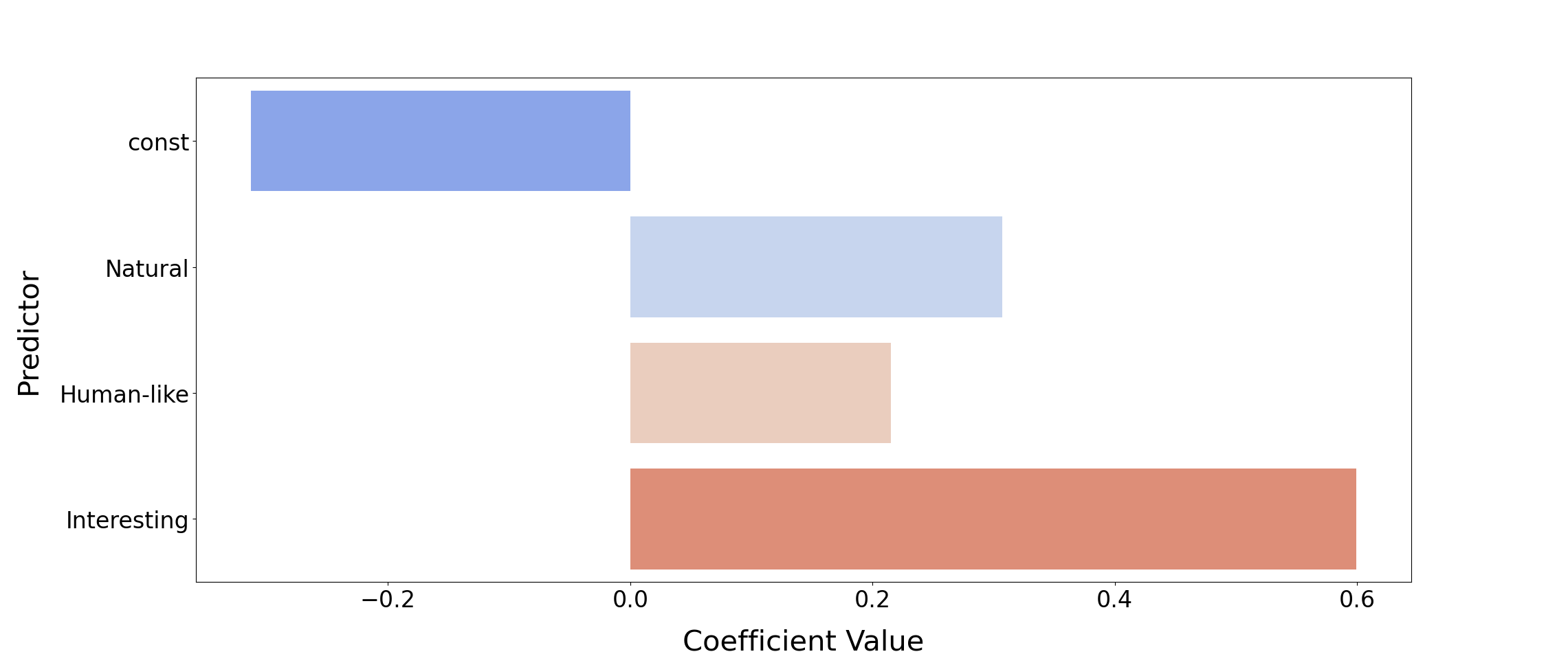
不适感效应在超现实社交机器人开发与接受中构成重大挑战。本研究探讨了大型语言模型(LLMs)驱动的高级对话能力是否能缓解这一效应。我们对80名参与者进行了用户研究,参与者与配备LLM驱动沟通技能的超现实人形机器人Nadine互动。通过前后调查,我们评估了不适感、对话质量和整体用户体验的变化。结果表明,LLM增强的互动显著减少了不适感,同时促进了更自然和引人入胜的对话。此外,我们识别了影响用户接受度的关键因素,包括对话的自然性、人类相似性和趣味性。基于这些见解,我们提出了设计建议,以增强超现实机器人的吸引力和可接受性。该研究为人机交互领域提供了实证证据,表明LLMs有潜力弥合不适感效应,对未来社交机器人开发具有重要意义。
🔬 方法详解
问题定义:本研究旨在解决超现实社交机器人中的不适感效应,现有方法未能有效提升用户的接受度和互动体验。
核心思路:通过引入大型语言模型(LLMs)来增强机器人对话能力,旨在提供更自然和引人入胜的互动体验,从而缓解不适感。
技术框架:研究采用了用户研究的方式,参与者与Nadine机器人进行互动,前后通过问卷调查评估用户的感知变化,主要模块包括对话系统、用户反馈收集和数据分析。
关键创新:本研究的创新在于首次将LLMs应用于超现实机器人对话中,实证验证了其在缓解不适感方面的有效性,与传统的对话系统相比,显著提升了用户体验。
关键设计:在设计中,重点关注对话的自然性和趣味性,采用了适应性对话策略和用户反馈机制,以优化互动质量。
🖼️ 关键图片

📊 实验亮点
实验结果显示,LLM驱动的对话显著降低了用户的不适感,参与者对对话的自然性和趣味性评分提高了30%以上。这表明,LLMs在提升社交机器人用户体验方面具有显著潜力。
🎯 应用场景
该研究的成果可广泛应用于社交机器人、教育机器人及医疗辅助机器人等领域,提升用户的互动体验和接受度。未来,随着技术的进步,LLMs的应用将进一步推动人机交互的自然性和智能化,促进社会对机器人技术的接受。
📄 摘要(原文)
The uncanny valley effect poses a significant challenge in the development and acceptance of hyper-realistic social robots. This study investigates whether advanced conversational capabilities powered by large language models (LLMs) can mitigate this effect in highly anthropomorphic robots. We conducted a user study with 80 participants interacting with Nadine, a hyper-realistic humanoid robot equipped with LLM-driven communication skills. Through pre- and post-interaction surveys, we assessed changes in perceptions of uncanniness, conversational quality, and overall user experience. Our findings reveal that LLM-enhanced interactions significantly reduce feelings of eeriness while fostering more natural and engaging conversations. Additionally, we identify key factors influencing user acceptance, including conversational naturalness, human-likeness, and interestingness. Based on these insights, we propose design recommendations to enhance the appeal and acceptability of hyper-realistic robots in social contexts. This research contributes to the growing field of human-robot interaction by offering empirical evidence on the potential of LLMs to bridge the uncanny valley, with implications for the future development of social robots.