Successor-Generator Planning with LLM-generated Heuristics
作者: Alexander Tuisov, Yonatan Vernik, Alexander Shleyfman
分类: cs.AI
发布日期: 2025-01-30 (更新: 2026-01-06)
💡 一句话要点
利用LLM生成启发式函数的后继生成器规划方法,提升领域无关规划性能。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 大型语言模型 启发式搜索 自动规划 领域无关规划 后继生成器 问题求解 人工智能
📋 核心要点
- 传统领域无关规划依赖手工设计的启发式函数,泛化性强但缺乏针对性,难以处理复杂问题。
- 利用LLM直接从问题定义生成启发式函数,无需人工干预,可处理包含复杂数值约束或自定义转换动态的问题。
- 实验表明,该方法在多个规划基准测试中达到或超过了现有最佳性能,验证了其有效性。
📝 摘要(中文)
本文提出了一种利用大型语言模型(LLM)自动合成启发式函数的规划方法,该方法直接从问题定义中生成启发式函数,无需手工设计的领域知识。规划任务通过后继生成器、目标测试和用通用编程语言编写的初始状态来指定。生成的启发式函数被编译并集成到标准的启发式搜索算法中,例如贪婪最佳优先搜索。实验结果表明,该方法在广泛的规划基准测试中取得了有竞争力的,甚至是最先进的性能。此外,它能够解决传统形式难以表达的问题,包括具有复杂数值约束或自定义转换动态的问题。通过广泛的实验评估,验证了该方法在不同规划环境中的有效性,并分析了其优势和局限性。
🔬 方法详解
问题定义:传统的领域无关规划方法依赖于手工设计的启发式函数,这些函数虽然具有广泛的适用性,但在处理具有复杂数值约束或自定义转换动态的问题时,往往表现不佳。现有方法需要大量的领域知识和人工调整,难以适应新的规划任务。
核心思路:本文的核心思路是利用大型语言模型(LLM)的强大生成能力,直接从规划问题的定义中自动生成启发式函数。这种方法避免了手工设计启发式函数的需要,并且可以根据具体问题的特点生成更有效的启发式函数。
技术框架:该方法的技术框架主要包括以下几个阶段:1) 使用通用编程语言(例如Python)定义规划任务,包括后继生成器、目标测试和初始状态。2) 将规划任务的定义输入到LLM中,LLM生成问题特定的启发式函数。3) 将生成的启发式函数编译并集成到标准的启发式搜索算法中,例如贪婪最佳优先搜索。4) 使用集成了LLM生成启发式函数的搜索算法求解规划问题。
关键创新:该方法最重要的技术创新点在于利用LLM自动生成启发式函数,从而避免了手工设计启发式函数的需要。与现有方法相比,该方法可以更好地适应新的规划任务,并且可以处理具有复杂数值约束或自定义转换动态的问题。
关键设计:论文中没有明确说明关键的参数设置、损失函数、网络结构等技术细节。LLM的具体选择和prompt工程是影响性能的关键因素,但论文中没有详细描述。如何将LLM生成的启发式函数有效地编译和集成到搜索算法中也是一个关键的设计问题,但具体实现细节未知。
🖼️ 关键图片

📊 实验亮点
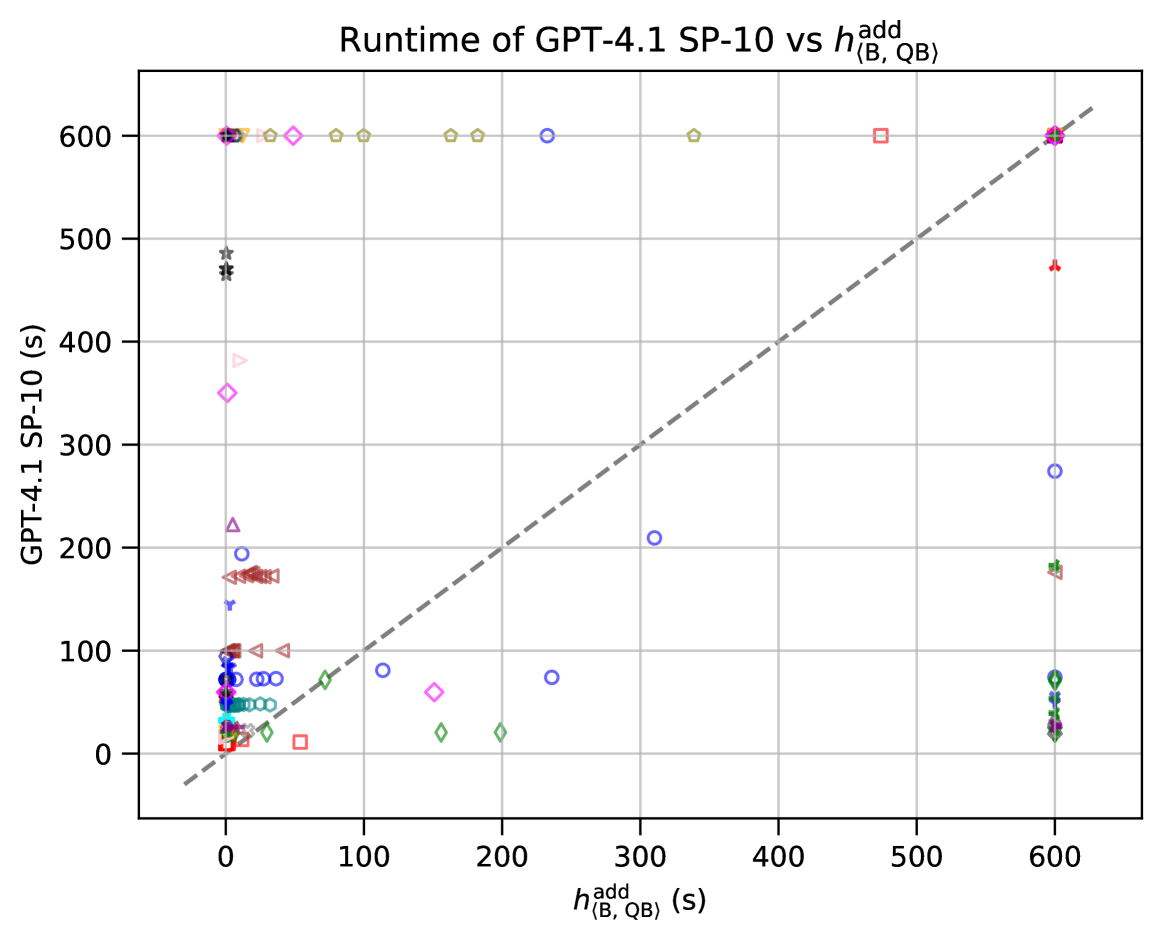
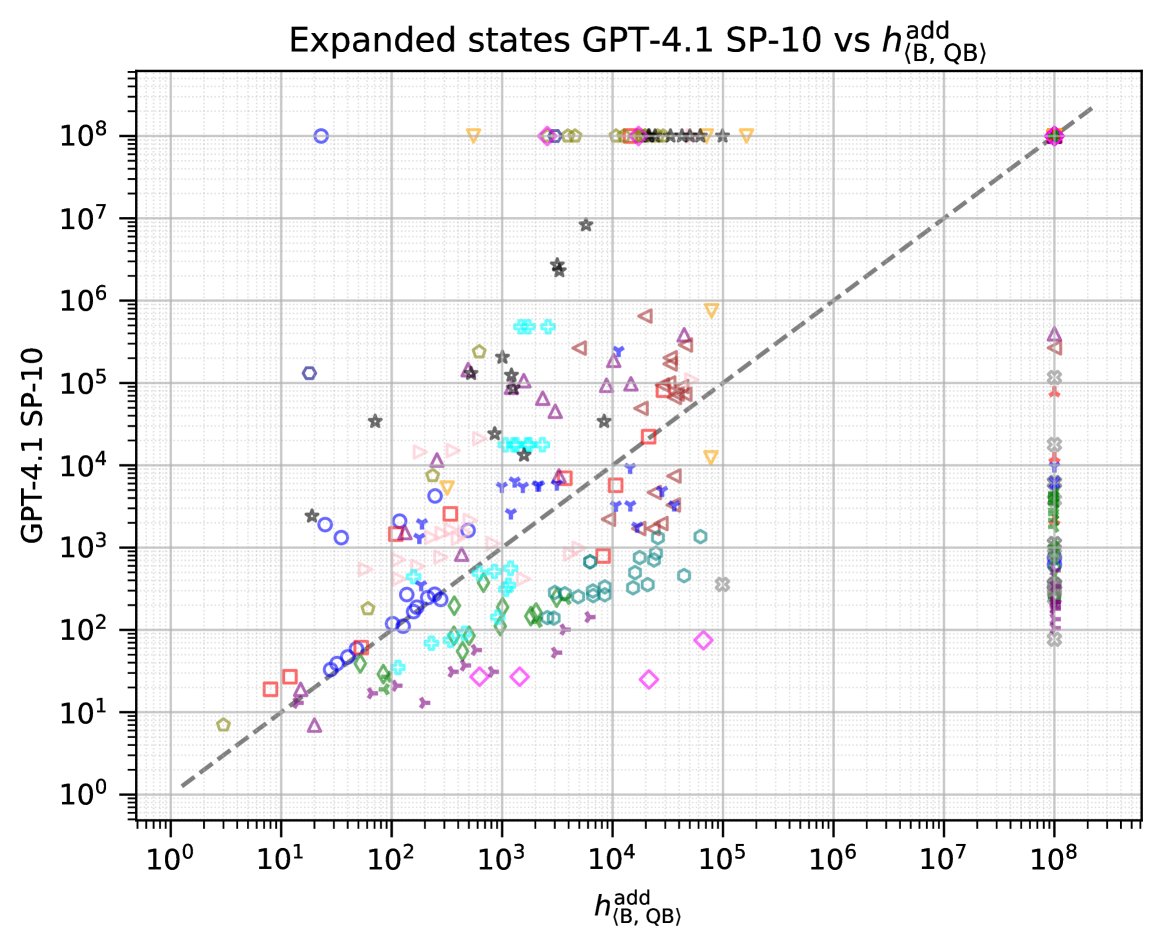
实验结果表明,该方法在多个规划基准测试中取得了有竞争力的,甚至是最先进的性能。具体来说,该方法在某些问题上能够显著优于传统的启发式搜索算法,并且能够解决传统形式难以表达的问题。具体的性能数据和提升幅度在论文中进行了详细的展示。
🎯 应用场景
该研究成果可应用于机器人导航、游戏AI、任务调度、资源分配等领域。通过自动生成启发式函数,可以降低规划系统的开发成本,提高规划效率,并解决传统方法难以处理的复杂规划问题。未来,该方法有望扩展到更广泛的规划领域,并与其他AI技术相结合,实现更智能化的规划系统。
📄 摘要(原文)
Heuristics are a central component of deterministic planning, particularly in domain-independent settings where general applicability is prioritized over task-specific tuning. This work revisits that paradigm in light of recent advances in large language models (LLMs), which enable the automatic synthesis of heuristics directly from problem definitions -- bypassing the need for handcrafted domain knowledge. We present a method that employs LLMs to generate problem-specific heuristic functions from planning tasks specified through successor generators, goal tests, and initial states written in a general-purpose programming language. These heuristics are compiled and integrated into standard heuristic search algorithms, such as greedy best-first search. Our approach achieves competitive, and in many cases state-of-the-art, performance across a broad range of established planning benchmarks. Moreover, it enables the solution of problems that are difficult to express in traditional formalisms, including those with complex numeric constraints or custom transition dynamics. We provide an extensive empirical evaluation that characterizes the strengths and limitations of the approach across diverse planning settings, demonstrating its effectiveness.